References
If you steal from one author, it’s plagiarism; if you steal from many, it’s research.
—Wilson Mizner
Literature is the question minus the answer.
—Roland Barthes
Everything that can be invented, has been invented.
—Charles H. Duell, 1899
[1] Adkins, W. A. and S. H. Weintraub (1992). Algebra: An Approach via Module Theory. Graduate Texts in Mathematics, 136. New York: Springer.
[2] Adleman, L. M., J. DeMarrais and M.-D. A. Huang (1994). “A Subexponential Algorithm for Discrete Logarithms over the Rational Subgroup of the Jacobians of Large Genus Hyperelliptic Curves over Finite Fields”, Algorithmic Number Theory—ANTS-I, Lecture Notes in Computer Science, 877. pp. 28–40. Berlin/Heidelberg: Springer.
[3] Adleman, L. M. and M.-D. A. Huang (1992). “Primality Testing and Two Dimensional Abelian Varieties over Finite Fields”, Lecture Notes in Mathematics, 1512. Berlin: Springer.
[4] Adleman, L. M., C. Pomerance and R. S. Rumely (1983). “On Distinguishing Prime Numbers from Composite Numbers”, Annals of Mathematics, 117: 173–206.
[5] Agarwal, M., N. Kayal and N. Saxena (2002), “Primes Is in P” [online document]. Available at http://www.cse.iitk.ac.in/users/manindra/algebra/primality_v6.pdf (October 2008).
[6] * Ahlfors, L. V. (1966). Complex Analysis. New York: McGraw-Hill.
[7] * Aho, A. V., J. E. Hopcroft and J. D. Ullman (1974). The Designs and Analysis of Algorithms. Reading, Massachusetts: Addison-Wesley.
[8] * Aho, A. V., J. E. Hopcroft and J. D. Ullman (1983). Data Structues and Algorithms. Reading, Massachusetts: Addison-Wesley.
[9] Aigner, M. and E. Oswald (2007), “Power Analysis Tutorial” [online document]. Available at http://www.iaik.tugraz.at/content/research/implementation_attacks/introduction_to_impa/dpa_tutorial.pdf (October 2008).
[10] Akkar, M.-L., R. Bevan, P. Dischamp and D. Moyart (2000). “Power Analysis, What Is Now Possible”, Advances in Cryptology—ASIACRYPT 2000, Lecture Notes in Computer Science, 1976. pp. 489–502. Berlin/Heidelberg: Springer.
[11] Anderson, R. and M. Kuhn (1997). “Low Cost Attacks on Tamper Resistant Devices”, Security Protocols—5th International Workshop, Lecture Notes in Computer Science, 1361. pp. 125–136. Berlin/Heidelberg: Springer.
[12] * Apostol, T. M. (1976). Introduction to Analytic Number Theory. Undergraduate Texts in Mathematics. New York: Springer.
[13] Arnold, V. I. (1999). “Polymathematics: Is Mathematics a Single Science or a Set of Arts?”, in V. Arnold, M. Atiyah, P. Lax and B. Mazur (eds.), Mathematics: Frontiers and Perspectives, pp. 403–416. Providence, Rhode Island: American Mathematical Society.
[14] Atiyah, M. F. and I. G. MacDonald (1969). Introduction to Commutative Algebra. Reading, Massachusetts: Addison-Wesley.
[15] Aumüller, C., P. Bier, W. Fischer, P. Hofreiter and J.-P. Seifert (2002), “Fault Attacks on RSA with CRT: Concrete Results and Practical Countermeasures” [online document]. Available at http://eprint.iacr.org/2002/073 (October 2008).
[16] Balasubramanian, R. and N. Koblitz (1998). “The Improbability that an Elliptic Curve has Subexponential Discrete Log Problem under the Menezes-Okamoto Vanstone Algorithm”, Journal of Cryptology, 11: 141–145.
[17] Bao, F., R. H. Deng, Y. Han, A. B. Jeng, A. D. Narasimhalu, T.-H. Ngair (1997). “Breaking Public Key Cryptosystems on Tamper Resistant Devices in the Presence of Transient Faults”, Security Protocols—5th International Workshop, Lecture Notes in Computer Science, 1361. pp. 115–124. Berlin/Heidelberg: Springer.
[18] Bellare, M. and P. Rogaway (1995). “Optimal Asymmetric Encryption—How to Encrypt with RSA”, Advances in Cryptology—EUROCRYPT ’94, Lecture Notes in Computer Science, 950. pp. 92–111. Berlin/Heidelberg: Springer. A revised version is available at http://www-cse.ucsd.edu/users/mihir/papers/oaep.html (October 2008).
[19] Bellare, M. and P. Rogaway (1996). “The Exact Security of Digital Signatures: How to Sign with RSA and Rabin”, Advances in Cryptology—EUROCRYPT ’96, Lecture Notes in Computer Science, 1070. pp. 399–416. Berlin/Heidelberg: Springer. A revised version is available at http://www-cse.ucsd.edu/users/mihir/papers/exactsigs.html (October 2008).
[20] Bennett, C. H. and G. Brassard (1984). “Quantum Cryptography: Public Key Distribution and Coin Tossing”, pp. 175–179. Proceedings of the IEEE International Conference on Computers, Systems and Signal Processing, Bangalore, India, December.
[21] Berlekamp, E. R. (1968). Algebraic Coding Theory. New York: McGraw-Hill.
[22] Biham, E. and A. Shamir (1997). “Differential Fault Analysis of Secret Key Cryptosystems”, Advances in Cryptology—CRYPTO ’97, Lecture Notes in Computer Science, 1294. pp. 513–528. Berlin/Heidelberg: Springer.
[23] Blake, I. F., R. Fuji-Hara, R. C. Mullin and S. A. Vanstone (1984). “Computing Logarithms in Finite Fields of Characteristic Two”, SIAM Journal of Algebraic and Discrete Methods, 5: 276–285.
[24] Blake, I. F., G. Seroussi and N. P. Smart (1999). Elliptic Curves in Cryptography. Cambridge: Cambridge University Press.
[25] Blom, R. (1985). “An Optimal Class of Symmetric Key Generation Systems”, Advances in Cryptology—EUROCRYPT ’84, Lecture Notes in Computer Science, 209. pp. 335–338. Berlin/Heidelberg: Springer.
[26] Blum, L., M. Blum, and M. Shub (1986). “A Simple Unpredictable Pseudo-Random Number Generator”, SIAM Journal on Computing, 15: 364–383.
[27] Blum, M. and S. Goldwasser (1985). “An Efficient Probabilistic Public Key Encryption Scheme Which Hides All Partial Information”, Advances in Cryptology—CRYPTO ’84, Lecture Notes in Computer Science, 196. pp. 289–299. Berlin/Heidelberg: Springer.
[28] Blundo, C., A. De Santis, A. Herzberg, S. Kutten, U. Vaccaro and M. Yung (1993). “Perfectly-Secure Key Distribution for Dynamic Conferences”, Advances in Cryptology—CRYPTO ’92, Lecture Notes in Computer Science, 740. pp. 471–486. Berlin/Heidelberg: Springer.
[29] Boneh, D. (1999). “Twenty Years of Attacks on the RSA Cryptosystem”, Notices of the American Mathematical Society, 46 (2): 203–213.
[30] Boneh, D., R. A. DeMillo and R. J. Lipton (1997). “On the Importance of Checking Cryptographic Protocols for Faults”, Advances in Cryptology—EUROCRYPT ’97, Lecture Notes in Computer Science, 1233. pp. 37–51. Berlin/Heidelberg: Springer.
[31] Boneh, D., R. A. DeMillo and R. J. Lipton (2001). “On the Importance of Eliminating Errors in Cryptographic Computations”, Journal of Cryptology, 14 (2): 101–119.
[32] Boneh, D. and G. Durfee (1999). “Cryptanalysis of RSA with Private Key d Less Than N0.292”, Advances in Cryptology—EUROCRYPT ’99, Lecture Notes in Computer Science, 1592. pp. 1–11. Berlin/Heidelberg: Springer.
[33] Boneh, D., G. Durfee and Y. Frankel (1998). “Exposing an RSA Private Key Given a Small Fraction of Its Bits”, Advances in Cryptology—ASIACRYPT ’98, Lecture Notes in Computer Science, 1514. pp. 25–34. Berlin/Heidelberg: Springer.
[34] Boneh, D. and M. K. Franklin (2001). “Identity-based Encryption from the Weil Pairing”, Advances in Cryptology—CRYPTO 2001, Lecture Notes in Computer Science, 2139. pp. 213–229. Berlin/Heidelberg: Springer.
[35] Boneh, D. and M. K. Franklin (2003). “Identity-based Encryption from the Weil Pairing”, SIAM Journal of Computing, (32) 3: 586–615.
[36] Bressoud, D. M. (1989). Factorization and Primality Testing. Undergraduate Texts in Mathematics. New York: Springer.
[37] * Buchmann, J. A. (2004). Introduction to Cryptography. Undergraduate Texts in Mathematics. New York: Springer.
[38] Buchmann, J. A. et al. (2004), “The Number Field Cryptography Project” [online document]. Available at http://www.informatik.tu-darmstadt.de/TI/Forschung/nfc.html (October 2008).
[39] Buchmann, J. A. and S. Hamdy (2001). “A Survey on IQ Cryptography”. Technical report TI-4/01, TU Darmstadt, Fachbereich Informatik.
[40] Buchmann, J. A. and D. Weber (2000). “Discrete Logarithms: Recent Progress”, in J. Buchmann, T. Hoeholdt, H. Stichtenoth and H. Tapia-Recillas (eds.), Coding Theory, Cryptography and Related Areas, pp. 42–56. Proceedings of an International Conference on Coding Theory, Cryptography and Related Areas, Guanajuato, Mexico, April 1998.
[41] Buhler, J., H. W. Lenstra and C. Pomerance (1993). “Factoring Integers with the Number Field Sieve”, in A. K. Lenstra and H. W. Lenstra (eds.), The Development of the Number Field Sieve, Lecture Notes in Mathematics, 1554. pp. 50–94. Berlin: Springer.
[42] * Burton, D. M. (1998). Elementary Number Theory, 4th ed. New York: McGraw-Hill.
[43] Cantor, D. G. (1994). “On the Analogue of Division Polynomials for Hyperelliptic Curves”, Journal für die reine und angewandte Mathematik, 447: 91–145.
[44] Chan, H., A. Perrig and D. Song (2003). “Random Key Predistribution Schemes for Sensor Networks”, pp. 197–213. Proeedings of the 24th IEEE Symposium on Research in Security and Privacy, Berkeley, California, 11–14 May.
[45] Chari, S., C. S. Jutla, J. R. Rao, and P. Rohatgi (1999). “Towards Sound Approaches to Counteract Power-Analysis Attacks”, Advances in Cryptology—CRYPTO ’99, Lecture Notes in Computer Science, 1666. pp. 398–412. Berlin/Heidelberg: Springer.
[46] Charlap, L. S. and R. Coley (1990). “An Elementary Introduction to Elliptic Curves II”, CCR Expository Report 34.
[47] Charlap, L. S. and D. P. Robbins (1988). “An Elementary Introduction to Elliptic Curves”, CRD Expository Report 31.
[48] Chaum, D. (1983). “Blind Signatures for Untraceable Payments”, Advances in Cryptology—CRYPTO ’82. pp. 199–203. New York: Plenum Press.
[49] Chaum, D. (1985). “Security Without Identification: Transaction System to Make Big Brother Obsolete”, Communications of the ACM, 28 (10): 1030–1044.
[50] Chaum, D. (1989). “Privacy Protected Payments: Unconditional Payer and/or Payee Untraceability”, Smart Card 2000: The Future of IC Cards, pp. 69–93. Amsterdam: North-Holland.
[51] Chaum, D. (1990). “Zero-Knowledge Undeniable Signatures”, Advances in Cryptology—CRYPTO ’90, Lecture Notes in Computer Science, 473. pp. 458–464. Berlin/Heidelberg: Springer.
[52] Chaum, D. and H. van Antwerpen (1989). “Undeniable Signatures”, Advances in Cryptology—CRYPTO ’89, Lecture Notes in Computer Science, 435. pp. 212–217. Berlin/Heidelberg: Springer.
[53] Chaum, D., E. van Heijst and B. Pfitzmann (1991). “Cryptographically Strong Undeniable Signatures, Unconditionally Secure for the Signer”, Advances in Cryptology—CRYPTO ’91, Lecture Notes in Computer Science, 576. pp. 470–484. Berlin/Heidelberg: Springer.
[54] Chor, B. and R. L. Rivest (1988). “A Knapsack Type Cryptosystem Based on Arithmetic in Finite Fields”, IEEE Transactions on Information Theory, 34: 901–909.
[55] Clavier, C., J.-S. Coron and N. Dabbous (2000). “Differential Power Analysis in the Presence of Hardware Countermeasures”, Cryptographic Hardware and Embedded Systems—CHES 2000, Lecture Notes in Computer Science, 1965. pp. 252–263. Berlin/Heidelberg: Springer.
[56] Cohen, H. (1993). A Course in Computational Algebraic Number Theory. Graduate Texts in Mathematics, 138. New York: Springer.
[57] Coppersmith, D. (1984). “Fast Evaluation of Logarithms in Fields of Characteristic Two”, IEEE Transactions on Information Theory, 30: 587–594.
[58] Coppersmith, D. (1994). “Solving Homogeneous Equations over GF[2] via Block Wiedemann Algorithm”, Mathematics of Computation, 62: 333–350.
[59] Coppersmith, D., A. M. Odlyzko and R. Schroeppel (1986). “Discrete Logarithms in GF (p)”, Algorithmica, 1: 1–15.
[60] Coppersmith, D. and S. Winograd (1982). “On the Asymptotic Complexity of Matrix Multiplication”, SIAM Journal of Computing, 11 (3): 472–492.
[61] * Cormen, T. H., C. E. Lieserson, R. L. Rivest and C. Stein (2001). Introduction to Algorithms, 2nd ed. Cambridge, Massachusetts: MIT Press.
[62] Coron, J.-S. (1999). “Resistance Against Differential Power Analysis for Elliptic Curve Cryptosystems”, Cryptographic Hardware and Embedded Systems—CHES 1999, Lecture Notes in Computer Science, 1965. pp. 292–302. Berlin/Heidelberg: Springer.
[63] Coron, J.-S., L. Goubin (2000). “On Boolean and Arithmetic Masking Against Differential Power Analysis”, Cryptographic Hardware and Embedded Systems—CHES 2000, Lecture Notes in Computer Science, 1965. pp. 231–237. Berlin/Heidelberg: Springer.
[64] Coster, M. J., A. Joux, B. A. LaMacchia, A. M. Odlyzko, C. P. Schnorr and J. Stern (1992). “Improved Low-Density Subset Sum Algorithms”, Computational Complexity, 2: 111–128.
[65] Coster, M. J., B. A. LaMacchia, A. M. Odlyzko and C. P. Schnorr (1991). “An Improved Low-Density Subset Sum Algorithm”, Advances in Cryptology—EUROCRYPT ’91, Lecture Notes in Computer Science, 547. pp. 54–67. Berlin/Heidelberg: Springer.
[66] Courtois, N. (2003). “Fast Algebraic Attacks on Stream Ciphers with Linear Feedback”, Advances in Cryptology—CRYPTO 2003, Lecture Notes in Computer Science, 2729. pp. 177–194. Berlin/Heidelberg: Springer.
[67] Courtois, N. and W. Meier (2003). “Algebraic Attacks on Stream Ciphers with Linear Feedback”, Advances in Cryptology—EUROCRYPT 2003, Lecture Notes in Computer Science, 2656. pp. 345–359. Berlin/Heidelberg: Springer.
[68] Courtois, N. and J. Pieprzyk (2003). “Cryptanalysis of Block Ciphers with Overdefined Systems of Equations”, Advances in Cryptology—ASIACRYPT 2002, Lecture Notes in Computer Science, 2501. pp. 267–287. Berlin/Heidelberg: Springer.
[69] Crandall, R. and C. Pomerance (2001). Prime Numbers: A Computational Perspective. New York: Springer.
[70] Crépeau, C. and A. Slakmon (2003). “Simple Backdoors for RSA Key Generation”, Topics in Cryptology—CT-RSA 2003, Lecture Notes in Computer Science, 2612. pp. 403–416. Berlin/Heidelberg: Springer.
[71] Daemen, J. and V. Rijmen (2002). The Design of Rijndael: AES—The Advanced Encryption Standard. New York: Springer.
[72] Das, A. (1999). Galois Field Computations: Implementation of a Library and a Study of the Discrete Logarithm Problem [dissertation]. Bangalore, India: Indian Institute of Science.
[73] Das, A. and C. E. Veni Madhavan (1999). “Performance Comparison of Linear Sieve and Cubic Sieve Algorithms for Discrete Logarithms over Prime Fields”, Algorithms and Computation, ISAAC ’99, Lecture Notes in Computer Science, 1741. pp. 295–306. Berlin/Heidelberg: Springer.
[74] * Delfs, H. and H. Knebl (2007). Introduction to Cryptography: Principles and Applications, 2nd ed. Berlin and New York: Springer.
[75] Deutsch, D. (1985). “Quantum Theory, the Church-Turing Principle and the Universal Quantum Computer”. Proceedings of the Royal Society of London, Series A, 400. pp. 97–117.
[76] Deutsch, D. (1998). The Fabric of Reality: The Science of Parallel Universes—and Its Implications. London: Penguin.
[77] Dhem, J.-F., F. Koeune, P.-A. Leroux, P. Mestré, J.-J. Quisquater and J.-L. Willems (2000). “A Practical Implementation of the Timing Attack”, in J.-J. Quisquater and B. Schneier (eds.), Smart Card: Research and Applications, Lecture Notes in Computer Science, 1820. Proceedings of the Third Working Conference on Smart Card Research and Advanced Applications—CARDIS ’98, Louvain-la-Neuve, Belgium, 14–16 September 1998. Springer.
[78] Diffie, W. and M. Hellman (1976). “New Directions in Cryptography”, IEEE Transactions on Information Theory, 22: 644–654.
[79] Du, W., J. Deng, Y. S. Han and P. K. Varshney (2003). “Establishing Pairwise Keys in Distributed Sensor Networks”, pp. 42–51. Proceedings of the 10th ACM Conference on Computer and Communication Security, Washington D.C., USA, 27–30 October.
[80] Du, W., J. Deng, Y. S. Han, S. Chen and P. K. Varshney (2004). “A Key Management Scheme for Wireless Sensor Networks Using Deployment Knowledge”. Proceedings of IEEE INFOCOM 2004, Hong Kong, 7–11 March.
[81] * Dummit, D. and R. Foote (2004). Abstract Algebra, 3rd ed. Somerset, New Jersey: John Wiley & Sons.
[82] Durfee, G. and P. Q. Nguyen (2000). “Cryptanalysis of the RSA Schemes with Short Secret Exponent from Asiacrypt ’99”, Advances in Cryptology—ASIACRYPT 2000, Lecture Notes in Computer Science, 1976. pp. 30–44. Berlin/Heidelberg: Springer.
[83] Dusart, P. (1999). “The kth Prime Is Greater than k(ln k+ln ln k–1) for k > 2”, Mathematics of Computation, 68: 411–415.
[84] ElGamal, T. (1985). “A Public-Key Cryptosystem and a Signature Scheme Based on Discrete Logarithms”, IEEE Transactions on Information Theory, 31: 469–472.
[85] Elkies, N. D. (1998). “Elliptic and Modular Curves over Finite Fields and Related Computational Issues”, AMS/IP Studies in Advanced Mathematics, 7: 21–76.
[86] Enge, A. (1999). “Computing Discrete Logarithms in High-Genus Hyperelliptic Jacobians in Provably Subexponential Time”. Technical report CORR 99-04, University of Waterloo, Canada.
[87] Enge, A. and P. Gaudry (2002). “A General Framework for Subexponential Discrete Logarithm Algorithms”, Acta Arithmetica, 102 (1): 83–103.
[88] Eschenauer, L. and V. D. Gligor (2002). “A Key-Management Scheme for Distributed Sensor Networks”. Proceedings of the 9th ACM Conference on Computer and Communication Security, pp. 41–47. Washington D.C., USA, 18–22 November.
[89] * Esmonde, J. and M. Ram Murty (1999). Problems in Algebraic Number Theory. Graduate Texts in Mathematics, 190. New York: Springer.
[90] Fiat, A. and A. Shamir (1987). “How to Prove Yourself: Practical Solutions to Identification and Signature Problems”, Advances in Cryptology—CRYPTO ’86, Lecture Notes in Computer Science, 263. pp. 186–194. Berlin/Heidelberg: Springer.
[91] Feige, U., A. Fiat, and A. Shamir (1988). “Zero-Knowledge Proofs of Identity”, Journal of Cryptology, 1: 77–94.
[92] * Feller, W. (1966). Introduction to Probability Theory and Its Applications, 3rd ed. New York: John Wiley & Sons.
[93] Ferguson, N., J. Kelsey, S. Lucks, B. Schneier, M. Stay, D. Wagner and D. Whiting (2000). “Improved Cryptanalysis of Rijndael”, Fast Software Encryption—FSE 2000, Lecture Notes in Computer Science, 1978. pp. 213–230. Berlin/Heidelberg: Springer.
[94] Fouquet, M., P. Gaudry and R. Harley (2000). “An Extension of Satoh’s Algorithm and Its Implementation”, Journal of Ramanujan Mathematical Society, 15: 281–318.
[95] Fouquet, M., P. Gaudry and R. Harley (2001). “Finding Secure Curves with the Satoh-FGH Algorithm and an Early-Abort Strategy”, Advances in Cryptology—EUROCRYPT 2001, Lecture Notes in Computer Science, 2045. Berlin/Heidelberg: Springer.
[96] * Fraleigh, J. B. (1998). A First Course in Abstract Algebra, 6th ed. Reading, Massachusetts: Addison-Wesley.
[97] Fujisaki, E., T. Kobayashi, H. Morita, H. Oguro, T. Okamoto, S. Okazaki, D. Pointcheval and S. Uchiyama (1999). “EPOC: Efficient Probabilistic Public-Key Encryption”, contribution to IEEE P1363a.
[98] Fujisaki, E., T. Okamoto, D. Pointcheval, J. Stern (2001). “RSA-OAEP is Secure under the RSA Assumption”, Advances in Cryptology—CRYPTO 2001, Lecture Notes in Computer Science, 2139. pp. 260–274. Berlin/Heidelberg: Springer.
[99] Fulton, W. (1969). Algebraic Curves. Mathematics Lecture Notes Series. New York: W. A. Benjamin.
[100] Galbraith, S. D. (2003). “Weil Descent of Jacobians”, Discrete Applied Mathematics, 128 (1): 165–180.
[101] Galbraith, S. D., F. Hess and N. P. Smart (2002). “Extending the GHS Weil Descent Attack”, Advances in Cryptology—EUROCRYPT 2002, Lecture Notes in Computer Science, 2332. pp. 29–44. Berlin/Heidelberg: Springer.
[102] Galbraith, S. D., W. Mao, and K. G. Paterson (2002). “RSA-based Undeniable Signatures for General Moduli”, Topics in Cryptology—CT-RSA 2002, Lecture Notes in Computer Science, 2271. pp. 200–217. Berlin/Heidelberg: Springer.
[103] Gathen, J. von zur and J. Gerhard (1999). Modern Computer Algebra. Cambridge: Cambridge University Press.
[104] Gathen, J. von zur and V. Shoup (1992). “Computing Frobenius Maps and Factoring Polynomials”, pp. 97–105. Proceedings of the 24th Annual ACM Symposium on Theory of Computing, Victoria, British Columbia, Canada.
[105] Gaudry, P. (2000). “An Algorithm for Solving the Discrete Log Problem on Hyperelliptic Curves”, Advances in Cryptology—EUROCRYPT 2000, Lecture Notes in Computer Science, 1807. pp. 19–34. Berlin/Heidelberg: Springer.
[106] Gaudry, P. and R. Harley (2000). “Counting Points on Hyperelliptic Curves over Finite Fields”, Algorithmic Number Theory—ANTS-IV, Lecture Notes in Computer Science, 1838. pp. 313–332. Berlin/Heidelberg: Springer.
[107] Gaudry, P., F. Hess and N. P. Smart (2002). “Constructive and Destructive Facets of Weil Descent on Elliptic Curves”, Journal of Cryptology, 15 (1): 19–46.
[108] Geddes, K. O., S. R. Czapor and G. Labahn (1992). Algorithms for Computer Algebra. Boston: Kluwer Academic Publishers.
[109] Gennaro, R., H. Krawczyk and T. Rabin (2000). “RSA-based Undeniable Signatures”, Journal of Cryptology, 13 (4): 397–416.
[110] Gentry, C., J. Jonsson, M. Szydlo and J. Stern (2001). “Cryptanalysis of the NTRU Signature Scheme (NSS) from Eurocrypt 2001”, Advances in Cryptology—ASIACRYPT 2001, Lecture Notes in Computer Science, 2248. pp. 1–20. Berlin/Heidelberg: Springer.
[111] Gentry, C. and M. Szydlo (2002). “Cryptanalysis of the NTRU Signature Scheme”, Advances in Cryptology—EUROCRYPT ’02, Lecture Notes in Computer Science, 2332. pp. 299–320. Berlin/Heidelberg: Springer.
[112] Gilbert, H. and M. Minier (2000). “A Collision Attack on Seven Rounds of Rijndael”, pp. 230–241. Proceedings of the 3rd AES Conference, NIST, New York, April 2000.
[113] * Goldreich, O. (2001). Foundations of Cryptography, Volume 1: Basic Tools. Cambridge: Cambridge University Press.
[114] * Goldreich, O. (2004). Foundations of Cryptography, Volume 2: Basic Applications. Cambridge: Cambridge University Press.
[115] Goldreich, O., S. Goldwasser and S. Halevi (1997). “Public-key Cryptosystems from Lattice Reduction Problems”, Advances in Cryptology—CRYPTO ’97, Lecture Notes in Computer Science, 1294. pp. 112–131. Berlin/Heidelberg: Springer.
[116] Goldwasser, S. and J. Kilian (1986). “Almost All Primes Can Be Quickly Certified”, pp. 316–329. Prodeedings of the 18th Annual ACM Symposium on Theory of Computing, Berkeley, California.
[117] Goldwasser, S. and S. Micali (1984). “Probabilistic Encryption”, Journal of Computer and Systems Sciences, 28: 270–299.
[118] Gordon, D. M. (1985). “Strong Primes are Easy to Find”, Advances in Cryptology—EUROCRYPT ’84, Lecture Notes in Computer Science, 209. pp. 216–223. Berlin/Heidelberg: Springer.
[119] Gordon, D. M. (1993). “Discrete Logarithms in GF (p) Using the Number Field Sieve”, SIAM Journal of Discrete Mathematics, 6: 124–138.
[120] Gordon, D. M. and K. S. McCurley (1992). “Massively Parallel Computation of Discrete Logarithms”, Advances in Cryptology—CRYPTO ’92, Lecture Notes in Computer Science, 740. pp. 312–323. Berlin/Heidelberg: Springer.
[121] Grinstead, C. M. and J. L. Snell (1997). Introduction to Probability, 2nd revised ed. Providence, Rhode Island: American Mathematical Society. The book is also available at http://www.dartmouth.edu/~chance/book.html (October 2008).
[122] Guillou, L. C. and J.-J. Quisquater (1988). “A Practical Zero-Knowledge Protocol Fitted to Security Microprocessor Minimizing Both Trasmission and Memory”, Advances in Cryptology—EUROCRYPT ’88, Lecture Notes in Computer Science, 330. pp. 123–128. Berlin/Heidelberg: Springer.
[123] Hankerson, D., A. J. Menezes and S. Vanstone (2004). Guide to Elliptic Curve Cryptography. New York: Springer.
[124] Hartshorne, R. (1977). Algebraic Geometry. Graduate Texts in Mathematics, 52. New York, Heidelberg and Berlin: Springer.
[125] * Herstein, I. N. (1975). Topics in Algebra. New York: John Wiley & Sons.
[126] Hess, F., G. Seroussi and N. P. Smart (2000). “Two Topics in Hyperelliptic Cryptography”. HP Labs technical report HPL-2000-118.
[127] * Hoffman, K. and R. Kunze (1971). Linear Algebra. Englewood Cliffs, New Jersey: Prentice-Hall.
[128] Hoffstein, J., N. Howgrave-Graham, J. Pipher, J. H. Silverman and W. White (2003). “NTRUSign: Digital Signatures Using the NTRU Lattice”, Topics in Cryptology—CT-RSA 2003, Lecture Notes in Computer Science, 2612. pp. 122–140. Berlin/Heidelberg: Springer.
[129] Hoffstein, J., N. Howgrave-Graham, J. Pipher, J. H. Silverman and W. White (2005). “Performance Improvements and a Baseline Parameter Generation Algorithm for NTRUSign”, Workshop on Mathematical Problems and Techniques in Cryptology, Barcelona, Spain, June 2005. Also available at http://www.ntru.com/cryptolab/articles.htm (October 2008).
[130] Hoffstein, J., J. Pipher and J. H. Silverman (1998). “NTRU: A Ring-Based Public Key Cryptosystem”, Algorithmic Number Theory—ANTS-III, Lecture Notes in Computer Science, 1423. pp. 267–288. Berlin/Heidelberg: Springer.
[131] Hoffstein, J., J. Pipher and J. H. Silverman (2001). “NSS: An NTRU Lattice-Based Signature Scheme”, Advances in Cryptology—EUROCRYPT 2001, Lecture Notes in Computer Science, 2045. pp. 211–228. Berlin/Heidelberg: Springer.
[132] Horster, P., M. Michels and H. Petersen (1994). “Meta-ElGamal Signature Schemes”. Technical report TR-94-5-F, Department of Computer Science, Teschnische Universität, Chemnitz-Zwickau.
[133] * Hungerford, T. W. (1974). Algebra, 5th ed. Graduate Texts in Mathematics, 73. Berlin: Springer.
[134] IEEE (2008), “Standard Specifications for Public-Key Cryptography” [online document]. Available at http://grouper.ieee.org/groups/1363/index.html (October 2008).
[135] IETF (2008), “The Internet Engineering Task Force” [online document]. Available at http://www.ietf.org/ (October 2008).
[136] * Ireland, K. and M. Rosen (1990). A Classical Introduction to Modern Number Theory. Graduate Texts in Mathematics, 84. New York: Springer.
[137] Izu, T., B. Möller and T. Takagi (2002). “Improved Elliptic Curve Multiplication Methods Resistant Against Side Channel Attacks”, Progress in Cryptology—INDOCRYPT 2002, Lecture Notes in Computer Science, 2551. pp. 296–313. Berlin/Heidelberg: Springer.
[138] Izu, T. and T. Takagi (2002). “A Fast Parallel Elliptic Curve Multiplication Resistant Against Side Channel Attacks”, Public Key Cryptography—PKC 2002, Lecture Notes in Computer Science, 2274. pp. 280–296. Berlin/Heidelberg: Springer. An improved version of this paper is published as the technical report CORR 2002-03 of the Centre for Applied Cryptographic Research, University of Waterloo, Canada, and is available at http://www.cacr.math.uwaterloo.ca/ (October 2008).
[139] Jacobson, M. J., N. Koblitz, J. H. Silverman, A. Stein and E. Teske (2000). “Analysis of the Xedni Calculus Attack”, Design, Codes and Cryptography, 20: 41–64.
[140] Janusz, G. J. (1995). Algebraic Number Fields. Providence, Rhode Island: American Mathematical Society.
[141] Johnson, D. and A. Menezes (1999). “The Elliptic Curve Digitial Signature Algorithm (ECDSA)”. Technical report CORR 99-34, Department of Combinatorics and Optimization, University of Waterloo, Canada. Also published in International Journal on Information Security (2001), 1: 36–63.
[142] Joye, M., A. K. Lenstra and J.-J. Quisquater (1999). “Chinese Remaindering Based Cryptosystems in the Presence of Faults”, Journal of Cryptology, 12 (4): 241–246.
[143] Kaltofen, E. and V. Shoup (1995). “Subquadratic-Time Factoring of Polynomials over Finite Fields”, pp. 398–406. Proceedings of the 27th Annual ACM Symposium on Theory of Computing, Las Vegas, Nevada.
[144] Kampkötter, W. (1991). Explizite Gleichungen für Jacobishe Varietäten hyperelliptischer Kurven [dissertation]. Essen: Gesamthochschule.
[145] Katz, J. and Y. Lindell (2007). Introduction to Modern Cryptography. Boca Raton, Florida; London and New York: CRC Press.
[146] Kaye, P. and C. Zalka (2004), “Optimized Quantum Implementation of Elliptic Curve Arithmetic over Binary Fields” [online document]. Available at http://arxiv.org/abs/quant-ph/0407095 (October 2008).
[147] * Knuth, D. E. (1997). The Art of Computer Programming, Volume 2: Seminumerical Algorithms. Reading, Massachusetts: Addison-Wesley.
[148] Ko, K. H., S. J. Lee, J. H. Cheon, J. W. Han, J. S. Kang and C. S. Park (2000). “New Public-Key Cryptosystem Using Braid Groups”, Advances in Cryptology—CRYPTO 2000, Lecture Notes in Computer Science, 1880. pp. 166–183. Berlin/Heidelberg: Springer.
[149] Koblitz, N. (1984). p-adic Numbers, p-adic Analysis, and Zeta-Functions, 2nd ed. Graduate Texts in Mathematics, 58. New York, Heidelberg and Berlin: Springer.
[150] Koblitz, N. (1987). “Elliptic Curve Cryptosystems”, Mathematics of Computation, 48: 203–209.
[151] Koblitz, N. (1989). “Hyperelliptic Cryptosystems”, Journal of Cryptology, 1: 139–150.
[152] Koblitz, N. (1993). Introduction to Elliptic Curves and Modular Forms, 2nd ed. Graduate Texts in Mathematics, 97. Berlin: Springer.
[153] * Koblitz, N. (1994). A Course in Number Theory and Cryptography, 2nd ed. New York:Springer.
[154] Koblitz, N. (1998). Algebraic Aspects of Cryptography. New York: Springer.
[155] Kocher, P. C. (1996). “Timing Attacks on Implementations of Diffie-Hellman, RSA, DSS, and Other Systems”, Advances in Cryptology—CRYPTO ’96, Lecture Notes in Computer Science, 1109. pp. 104–113. Berlin/Heidelberg: Springer.
[156] Kocher, P. C., J. Jaffe and B. Jun (1999). “Differential Power Analysis”, Advances in Cryptology—CRYPTO ’99, Lecture Notes in Computer Science, 1666. pp. 388–397. Berlin/Heidelberg: Springer.
[157] Lagarias, J. C. and A. M. Odlyzko (1985). “Solving Low-Density Subset Sum Problems”, Journal of ACM, 32: 229–246.
[158] LaMacchia, B. A. and A. M. Odlyzko (1991a). “Computation of Discrete Logarithms in Prime Fields”, Designs, Codes and Cryptography, 1: 46–62.
[159] LaMacchia, B. A. and A. M. Odlyzko (1991b). “Solving Large Sparse Linear Systems over Finite Fields”, Advances in Cryptology—CRYPTO ’90, Lecture Notes in Computer Science, 537. pp. 109–133. Berlin/Heidelberg: Springer.
[160] Lang, S. (1994). Algebraic Number Theory. Graduate Texts in Mathematics, 110. New York: Springer.
[161] Law, L., A. Menezes, A. Qu, J. Solinas and S. Vanstone (1998). “An Efficient Protocol for Authenticated Key Agreement”. Technical report CORR 98-05, Department of Combinatorics and Optimization, University of Waterloo, Canada.
[162] Lehmer, D. H. and R. E. Powers (1931). “On Factoring Large Numbers”, Bulletin of the AMS, 37: 770–776.
[163] Lenstra, A. K., E. Tromer, A. Shamir, W. Kortsmit, B. Dodson, J. Hughes and P. Leyland (2003). “Factoring Estimates for a 1024-Bit RSA Modulus”, Advances in Cryptology—ASIACRYPT 2003, Lecture Notes in Computer Science, 2894. pp. 55–74. Berlin/Heidelberg: Springer.
[164] Lenstra, A. K. and H. W. Lenstra (1990). “Algorithms in Number Theory”, in J. van Leeuwen (ed.), Handbook of Theoretical Computer Science, Volume A, pp. 675–715, Amsterdam: Elsevier.
[165] Lenstra, A. K. and H. W. Lenstra (ed.) (1993). The Development of the Number Field Sieve. Lecture Notes in Mathematics, 1554. Berlin: Springer.
[166] Lenstra, A. K., H. W. Lenstra and L. Lovasz (1982). “Factoring Polynomials with Rational Coefficients”, Mathematische Annalen, 261: 515–534.
[167] Lenstra, A. K., H. W. Lenstra, M. S. Manasse and J. M. Pollard (1990). “The Number Field Sieve”, pp. 564–572. Proceedings of the 22nd Annual ACM Symposium on Theory of Computing, Baltimore, Maryland, USA, 13–17 May.
[168] Lenstra, A. K. and A. Shamir (2000). “Analysis and Optimization of the TWINKLE Factoring Device”, Advances in Cryptology—EUROCRYPT 2000, Lecture Notes in Computer Science, 1807. pp. 35–52. Berlin/Heidelberg: Springer.
[169] Lenstra, A. K., A. Shamir, J. Tomlinson and E. Tromer (2002). “Analysis of Bernstein’s Factorization Circuit”, Advances in Cryptology—ASIACRYPT 2002, Lecture Notes in Computer Science, 2501. pp. 1–26. Berlin/Heidelberg: Springer.
[170] Lenstra, A. K. and E. R. Verheul (2000a). “The XTR Public Key System”, Advances in Cryptology—CRYPTO 2000, Lecture Notes in Computer Science, 1880. pp. 1–20. Berlin/Heidelberg: Springer.
[171] Lenstra, A. K. and E. R. Verheul (2000b). “Key Improvements to XTR”, Advances in Cryptology—ASIACRYPT 2000, Lecture Notes in Computer Science, 1976. pp. 220–233. Berlin/Heidelberg: Springer.
[172] Lenstra, A. K. and E. R. Verheul (2001a). “An Overview of the XTR Public Key System”, pp. 151–180. Proceedings of the Public Key Cryptography and Computational Number Theory Conference, Warsaw, Poland, 2000. Berlin: Verlages Walter de Gruyter.
[173] Lenstra, A. K. and E. R. Verheul (2001b). “Fast Irreducibility and Subgroup Membership Testing in XTR”, Public Key Cryptography—PKC 2001, Lecture Notes in Computer Science, 1992. pp. 73–86. Berlin/Heidelberg: Springer.
[174] Lenstra, H. W. (1987). “Factoring Integers with Elliptic Curves”, Annals of Mathematics, 126: 649–673.
[175] Lenstra, H. W. and C. Pomerance (2005), “Primality Testing with Gaussian Periods” [online document]. Available at http://www.math.dartmouth.edu/~carlp/PDF/complexity12.pdf (October 2008).
[176] Lercier, R. (1997). “Finding Good Random Elliptic Curves for Cryptosystems Defined over  “, Advances in Cryptology—EUROCRYPT ’97, Lecture Notes in Computer Science, 1233. pp. 379–392. Berlin/Heidelberg: Springer.
“, Advances in Cryptology—EUROCRYPT ’97, Lecture Notes in Computer Science, 1233. pp. 379–392. Berlin/Heidelberg: Springer.
[177] Lercier, R. and D. Lubicz (2003). “Counting Points on Elliptic Curves over Finite Fields of Small Characteristic in Quasi Quadratic Time”, Advances in Cryptology—EUROCRYPT 2003, Lecture Notes in Computer Science, 2656. pp. 360–373. Berlin/Heidelberg: Springer.
[178] Libert, B. and J.-J. Quisquater (2003), “New Identity Based Signcryption Schemes from Pairings” [online document]. Available at http://eprint.iacr.org/2003/023/ (October 2008).
[179] Lidl, R. and H. Niederreiter (1984). Finite Fields, Encyclopedia of Mathematics and Its Applications, 20. Cambridge: Cambridge University Press.
[180] Lidl, R. and H. Niederreiter (1994). Introduction to Finite Fields and Their Applications. Cambridge: Cambridge University Press.
[181] Liu, D. and P. Ning (2003a). “Establishing Pairwise Keys in Distributed Sensor Networks”, pp. 52–61. Proceedings of the 10th ACM Conference on Computer and Communication Security, Washington D.C., USA, October 2003.
[182] Liu, D. and P. Ning (2003b). “Location-Based Pairwise Key Establishments for Static Sensor Networks”, pp. 72–82. Proceedings of the 1st ACM Workshop on Security in Ad Hoc and Sensor Networks, Fairfax, Virginia, 31 October 2003.
[183] Liu, D., P. Ning and R. Li (2005). “Establishing Pairwise Keys in Distributed Sensor Networks”, ACM Transactions on Information and System Security, (8) 1: 41–77.
[184] Lucks, S. (2000). “Attacking Seven Rounds of Rijndael Under 192-bit and 256-bit Keys”, pp. 215–229. Proceedings of the 3rd Advanced Encryption Standard Candidate conference, New York, April 2000.
[185] Malone-Lee, J. (2002), “Identity-Based Signcryption” [online document]. Available at http://eprint.iacr.org/2002/098/ (October 2008).
[186] Mao, W. (2001). “New Zero-Knowledge Undeniable Signatures—Forgery of Signature Equivalent to Factor-isation”. Hewlett-Packard technical report HPL-2201-36.
[187] Mao, W. and K. G. Paterson (2000). “Convertible Undeniable Standard RSA Signatures”. Hewlett-Packard technical report HPL-2000-148.
[188] Matsumoto, T. and H. Imai (1988). “Public Quadratic Polynomial-Tuples for Efficient Signature-Verification and Message-Encryption”, Advances in Cryptology—EUROCRYPT ’88, Lecture Notes in Computer Science, 330. pp. 419–453. Berlin/Heidelberg: Springer.
[189] McCurley, K. S. (1990). “The Discrete Logarithm Problem”, in C. Pomerance and S. Goldwasser (eds.), Cryptology and Computational Number Theory: American Mathematical Society Short Course, Boulder, Colorado, 6–7 August 1989. Proceedings of Symposia in Applied Mathematics, 42. pp. 49–74. Providence, Rhode Island: American Mathematical Society.
[190] McEliece, R. J. (1978). “A Public-Key Cryptosystem Based on Algebraic Coding Theory”. DSN progress report 42–44, Jet Propulsion Laboratory, California Institute of Technology, pp. 114–116.
[191] Menezes, A. J. (ed.) (1993). Applications of Finite Fields. Boston: Kluwer Academic Publishers.
[192] Menezes, A. J. (1993). Elliptic Curve Public Key Cryptosystems. The Springer International Series in Engineering and Computer Science, 234. Springer. Available at http://books.google.co.in/books?id=bIb54ShKS68C (October 2008).
[193] Menezes, A. J., T. Okamoto and S. Vanstone (1993). “Reducing Elliptic Curve Logarithms to a Finite Field”, IEEE Transactions on Information Theory, 39: 1639–1646.
[194] Menezes, A. J., P. van Oorschot and S. Vanstone (1997). Handbook of Applied Cryptography. Boca Raton, Florida: CRC Press.
[195] Menezes, A. J., Y. Wu and R. Zuccherato (1996). “An Elementary Introduction to Hyperelliptic Curves”. CACR technical report CORR 96-19, University of Waterloo, Canada.
[196] Merkle, R. C. amd M. E. Hellman (1978). “Hiding Information and Signatures in Trapdoor Knapsacks”, IEEE Transactions on Information Theory, 24 (5): 525–530.
[197] Mermin, N. D. (2003). “From Cbits to Qbits: Teaching Computer Scientists Quantum Mechanics”, American Journal of Physics, 71: 23–30.
[198] Mermin, N. D. (2006), “Phys481-681-CS483 Lecture Notes and Homework Assignments” [online document]. Available at http://people.ccmr.cornell.edu/~mermin/qcomp/CS483.html (October 2008).
[199] Messerges, T. S. (2000). “Securing the AES Finalists Against Power Analysis Attacks”, Fast Software Encryption—FSE 2000, Lecture Notes in Computer Science, 1978. pp. 150–164. Berlin/Heidelberg: Springer.
[200] Messerges, T. S., E. A. Dabbish and R. H. Sloan (1999). “Power Analysis Attacks of Modular Exponentiation in Smartcards”, Cryptographic Hardware and Embedded Systems—CHES 1999, Lecture Notes in Computer Science, 1717. pp. 144–157. Berlin/Heidelberg: Springer.
[201] Messerges, T. S., E. A. Dabbish and R. H. Sloan (2002). “Examining Smart-Card Security Under the Threat of Power Analysis Attacks”, IEEE Transactions on Computers, 51 (4): 541–552.
[202] Michels, M. and M. Stadler (1997). “Efficient Convertible Undeniable Signature Schemes”, pp. 231–244. Proceedings of the 4th International Workshop on Selected Areas in Cryptography, Ottawa, Canada.
[203] Mignotte, M. (1992). Mathematics for Computer Algebra. New York: Springer.
[204] Miller, G. L. (1976). “Riemann’s Hypothesis and Tests for Primality”, Journal of Computer and System Sciences, 13: 300–317.
[205] Miller, V. (1986). “Uses of Elliptic Curves in Cryptography”, Advances in Cryptology—CRYPTO ’85, Lecture Notes in Computer Science, 18. pp. 417–426. Berlin/Heidelberg: Springer.
[206] Möller, B. (2001). “Securing Elliptic Curve Point Multiplication Against Side-Channel Attacks”, Information Security Conference, Lecture Notes in Computer Science, 2200. pp. 324–334. Berlin/Heidelberg: Springer.
[207] Mollin, R. A. (1998). Fundamental Number Theory with Applications. Boca Raton, Florida: Chapman & Hall/CRC.
[208] Mollin, R. A. (1999). Algebraic Number Theory. Boca Raton, Florida: Chapman & Hall/CRC.
[209] Mollin, R. A. (2001). An Introduction to Cryptography. Boca Raton, Florida: Chapman & Hall/CRC.
[210] Montgomery, P. L. (1985). “Modular Multiplication Without Trial Division”, Mathematics of Computation, 44: 519–521.
[211] Montgomery, P. L. (1994). “A Survey of Modern Integer Factorization Algorithms”, CWI Quarterly, 7 (4): 337–366.
[212] Montgomery, P. L. (1995). “A Block Lanczos Algorithm for Finding Dependencies over GF(2)”, Advances in Cryptology—EUROCRYPT ’95, Lecture Notes in Computer Science, 921. pp. 106–120. Berlin/Heidelberg: Springer.
[213] Morrison, M. A. and J. Brillhart (1975). “A Method of Factoring and a Factorization of F7”, Mathematics of Computation, 29: 183–205.
[214] * Motwani, R. and P. Raghavan (1995). Randomized Algorithms. Cambridge: Cambridge University Press.
[215] Muir, J. A. (2001). Techniques of Side Channel Cryptanalysis [dissertation]. Canada: University of Waterloo. Available at http://www.uwspace.uwaterloo.ca/bitstream/10012/1098/1/jamuir2001.pdf (October 2008).
[216] Neukirch, J. (1999). Algebraic Number Theory. Berlin and Heidelberg: Springer.
[217] Nguyen, P. Q. (2006), “A Note on the Security of NTRUSign” [online document]. Available at http://eprint.iacr.org/2006/387 (October 2008).
[218] * Nielsen, M. A. and I. L. Chuang (2000). Quantum Computation and Quantum Information. Cambridge: Cambridge University Press.
[219] NIST (2001), “Advanced Encryption Standard” [online document]. Available at http://csrc.nist.gov/publications/fips/fips197/fips-197.pdf (October 2008).
[220] NIST (2006), “Digital Signature Standard (DSS)” [online document]. Available at http://csrc.nist.gov/publications/drafts/fips_186-3/Draft-FIPS-186-3%20_March2006.pdf (October 2008).
[221] NIST (2007a), “Federal Information Processing Standards” [online document]. Available at http://csrc.nist.gov/publications/PubsFIPS.html (October 2008).
[222] NIST (2007b), “Secure Hash Standard (SHS)” [online document]. Available at http://csrc.nist.gov/publications/drafts/fips_180-3/draft_fips-180-3_June-08-2007.pdf (October 2008).
[223] Nyberg, K. and R. A. Rueppel (1993). “A New Signature Scheme Based on the DSA Giving Message Recovery”, pp. 58–61. Proceedings of the 1st ACM Conference on Computer and Communications Security, Fairfax, Virginia, 3–5 November.
[224] Nyberg, K. and R. A. Rueppel (1995). “Message Recovery for Signature Schemes Based on the Discrete Logarithm Problem”, Advances in Cryptology—EUROCRYPT ’94, Lecture Notes in Computer Science, 950. pp. 182–193. Berlin/Heidelberg: Springer.
[225] Odlyzko, A. M. (1985). “Discrete Logarithms and Their Cryptographic Significance”, Advances in Cryptology—EUROCRYPT ’84, Lecture Notes in Computer Science, 209. pp. 224–314. Berlin/Heidelberg: Springer.
[226] Odlyzko, A. M. (2000). “Discrete Logarithms: The Past and the Future”, Designs, Codes and Cryptography, 19: 129–145.
[227] Okamoto, T. (1992). “Provably Secure and Practical Identification Schemes and Corresponding Signature Schemes”, Advances in Cryptology—CRYPTO ’92, Lecture Notes in Computer Science, 740. pp. 31–53. Berlin/Heidelberg: Springer.
[228] Okamoto, T., E. Fujisaki and H. Morita (1998). “TSH-ESIGN: Efficient Digital Signature Scheme Using Trisection Size Hash”, submission to IEEE P1363a.
[229] Papadimitriou, C. H. (1994). Computational Complexity. Reading, Massachusetts: Addison-Wesley.
[230] Park, S., T. Kim, Y. An and D. Won (1995). “A Provably Entrusted Undeniable Signature”, pp. 644–648. IEEE Singapore International Conference on Network/International Conference on Information Engineering (SICON/ICIE ’95).
[231] Patarin, J. (1995). “Cryptanalysis of the Matsumoto and Imai Public Key Scheme of Eurocrypt’88”, Advances in Cryptology—CRYPTO ’95, Lecture Notes in Computer Science, 963. pp. 248–261. Berlin/Heidelberg: Springer.
[232] Patarin, J. (1996). “Hidden Fields Equations (HFE) and Isomorphisms of Polynomials (IP): Two New Families of Asymmetric Algorithms”, Advances in Cryptology—EUROCRYPT ’96, Lecture Notes in Computer Science, 1070. pp. 33–48. Berlin/Heidelberg: Springer.
[233] Pirsig, R. M. (1974). Zen and the Art of Motorcycle Maintenance: An Inquiry into Values. London: Bodley Head.
[234] Pohlig, S. and M. Hellman (1978). “An Improved Algorithm for Computing Logarithms over GF (p) and its Cryptographic Significance”, IEEE Transactions on Information Theory, 24: 106–110.
[235] Pohst, M. and H. Zassenhaus (1989). Algorithmic Algebraic Number Theory, Encyclopaedia of Mathematics and Its Applications, 30. Cambridge: Cambridge University Press.
[236] Pointcheval, D. and J. Stern (1996). “Provably Secure Blind Signature Schemes”, Advances in Cryptology—ASIACRYPT ’96, Lecture Notes in Computer Science, 1163. pp. 252–265. Berlin/Heidelberg: Springer.
[237] Pointcheval, D. and J. Stern (2000). “Security Arguments for Digital Signatures and Blind Signatures”, Journal of Cryptology, 13 (3): 361–396.
[238] Pollard, J. M. (1974). “Theorems on Factorization and Primality Testing”, Proceedings of the Cambridge Philosophical Society, 76 (2): 521–528.
[239] Pollard, J. M. (1975). “A Monte Carlo Method for Factorization”, BIT, 15 (3): 331–334.
[240] Pollard, J. M. (1993). “Factoring with Cubic Integers”, in A. K. Lenstra and H. W. Lenstra (eds.), The Development of the Number Field Sieve, Lecture Notes in Mathematics, 1554. pp. 4–10. Berlin: Springer.
[241] Pomerance, C. (1985). “The Quadratic Sieve Factoring Algorithm”, Advances in Cryptology—EUROCRYPT ’84, Lecture Notes in Computer Science, 209. pp. 169–182. Berlin/Heidelberg: Springer.
[242] Pomerance, C. (2008). “Elementary Thoughts on Discrete Logarithms”, pp. 385–396. in J. P. Buhler and P. Stevenhagen (eds.), Surveys in Algorithmic Number Theory, Publications of the Research Institute for Mathematical Sciences, 44. New York: Cambridge University Press.
[243] Preskill, J. (1998). “Quantum Computing: Pro and Con”, Proceedings of the Royal Society of London, A454:469–486.
[244] Preskill, J. (2007), “Course Information for Quantum Computation” [online document]. Available at http://theory.caltech.edu/people/preskill/ph219/ (October 2008).
[245] Proos, J. and C. Zalka (2004), “Shor’s Discrete Logarithm Quantum Algorithm for Elliptic Curves” [online document]. Available at http://arxiv.org/abs/quant-ph/0301141 (October 2008).
[246] Rabin, M. O. (1979). “Digitalized Signatures and Public-Key Functions as Intractable as Factorization”. Technical report MIT/LCS/TR-212, MIT Laboratory for Computer Science, Massachusetts.
[247] Rabin, M. O. (1980a). “Probabilistic Algorithms in Finite Fields”, SIAM Journal of Computing, 9: 273–280.
[248] Rabin, M. O. (1980b). “Probabilistic Algorithm for Testing Primality”, Journal of Number Theory, 12: 128–138.
[249] Ram Murty, M. (2001). Problems in Analytic Number Theory. New York: Springer.
[250] Raymond, J.-F. and A. Stiglic (2000), “Security Issues in the Diffie-Hellman Key Agreement Protocol” [online document]. Available at http://crypto.cs.mcgill.ca/~stiglic/Papers/dhfull.pdf (October 2008).
[251] Ribenboim, P. (2001). Classical Theory of Algebraic Numbers. Universitext. New York: Springer.
[252] Rivest, R. L., A. Shamir, and L. M. Adleman (1978). “A Method for Obtaining Digital Signatures and Public-Key Cryptosystems”, Communications of the ACM, 2: 120–126.
[253] Rosser, J. and J. Schoenfield (1962). “Approximate Formulas for Some Functions of Prime Numbers”, Illinois Journal of Mathematics, 6: 64–94.
[254] RSA Security Inc. (2008), “Public-Key Cryptography Standards” [online document]. Available at http://www.rsa.com/rsalabs/node.asp?id=2124 (October 2008).
[255] Sakurai, J. J. (1994). Modern Quantum Mechanics. Revised by San-Fu Tuan, Reading, Massachusetts: Addison-Wesley.
[256] Satoh, T. (2000). “The Canonical Lift of an Ordinary Elliptic Curve over a Finite Field and Its Point Counting”, Journal of Ramanujan Mathematical Society, 15: 247–270.
[257] Satoh, T. and K. Araki (1998). “Fermat Quotients and the Polynomial Time Discrete Log Algorithm for Anomalous Elliptic Curves”, Commentarii Mathematici Universitatis Sancti Pauli, 47: 81–92.
[258] Schiff, L. I. (1968). Quantum Mechanics, 3rd ed. New York: McGraw-Hill.
[259] Schindler, W., F. Koeune and J.-J. Quisquater (2001). “Unleashing the Full Power of Timing Attack”. Technical report CG-2001/3, Université Catholique de Louvain, Belgium. Available at http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.23.6622.
[260] Schirokauer, O. (1993). “Discrete Logarithms and Local Units”, Philosophical Transactions of the Royal Society of London, Series A, 345: 409–423.
[261] Schirokauer, O., D. Weber, and T. Denny (1996). “Discrete Logarithms: The Effectiveness of the Index Calculus Method”, Algorithmic Number Theory—ANTS-II, Lecture Notes in Computer Science, 1122. pp. 337–361. Berlin/Heidelberg: Springer.
[262] * Schneier, B. (2006). Applied Cryptography, 2nd ed. New York: John Wiley & Sons.
[263] Schnorr, C. P. (1991). “Efficient Signature Generation for Smart Cards”, Journal of Cryptology, 4: 161–174.
[264] Schoof, R. (1995). “Counting Points on Elliptic Curves over Finite Fields”, Journal de Théorie des Nombres de Bourdeaux, 7: 219-254.
[265] Semaev, I. A. (1998). “Evaluation of Discrete Logarithms on Some Elliptic Curves”, Mathematics of Computation, 67: 353–356.
[266] Shamir, A. (1984). “A Polynomial-Time Algorithm for Breaking the Basic Merkle-Hellman Cryptosystem”, IEEE Transactions on Information Theory, 30: 699–704.
[267] Shamir, A. (1984). “Identity-Based Cryptosystems and Signature Schemes”, Advances in Cryptology—CRYPTO ’84, Lecture Notes in Computer Science, 196. pp. 47–53. Berlin/Heidelberg: Springer.
[268] Shamir, A. (1997). “How to Check Modular Exponentiation”, presented at the rump session of Advances in Cryptology—EUROCRYPT ’97, May.
[269] Shamir, A. (1999). “Factoring Large Numbers with the TWINKLE Device”, Cryptographic Hardware and Embedded Systems—CHES ’99, Lecture Notes in Computer Science, 1717. pp. 2–12. Berlin/Heidelberg: Springer.
[270] Shamir, A. and E. Tromer (2003). “Factoring Large Numbers with the TWIRL Device”, Advances in Cryptology—CRYPTO 2003, Lecture Notes in Computer Science, 2729. pp. 1–26. Berlin/Heidelberg: Springer.
[271] Shor, P. W. (1997). “Polynomial-Time Algorithms for Prime Factorization and Discrete Logarithms on a Quantum Computer”, SIAM Journal of Computing, 26: 1484–1509.
[272] Shoup, V. (1990). “On the Deterministic Complexity of Factoring Polynomials over Finite Fields”, Information Processing Letters, 33: 261–267.
[273] Shparlinski, I. E. (1991). “On Some Problems in the Theory of Finite Fields”, Russian Mathematical Surveys, 46 (1): 199–240.
[274] Shparlinski, I. E. (1992). Computational and Algorithmic Problems in Finite Fields, Mathematics and its Applications, 88. Kluwer Academic Publishers.
[275] * Silverman, J. H. (1986). The Arithmetic of Elliptic Curves. Graduate Texts in Mathematics, 106. Berlin and New York: Springer.
[276] Silverman, J. H. (1994). Advanced Topics in the Arithmetic of Elliptic Curves. Graduate Texts in Mathematics, 151. New York: Springer.
[277] Silverman, J. H. (2000). “The Xedni Calculus and the Elliptic Curve Discrete Logarithm Problem”, Design, Codes and Cryptography, 20: 5–40.
[278] Silverman, J. H. and J. Suzuki (1998). “Elliptic Curve Discrete Logarithms and the Index Calculus”, Advances in Cryptology—ASIACRYPT ’98, Lecture Notes in Computer Science, 1514. pp. 110–125. Berlin/Heidelberg: Springer.
[279] Silverman, R. D. (1987). “The Multiple Polynomial Quadratic Sieve”, Mathematics of Computation, 48: 329–339.
[280] * Sipser, M. (1997). Introduction to the Theory of Computation, 2nd ed. Boston: PWS Publishing Company.
[281] B. Skjernaa (2003). “Satoh’s Algorithm in Characteristic 2”, Mathematics of Computation, 72: 477–487.
[282] Smart, N. P. (1999). “The Discrete Logarithm Problem on Elliptic Curves of Trace One”, Journal of Cryptology, 12: 193–196.
[283] Smart, N. P. (2002). Cryptography: An Introduction. New York: McGraw-Hill. The 2nd edition of this book is available online at http://www.cs.bris.ac.uk/~nigel/Crypto_Book/ (October 2008).
[284] Smith, P. J. (1993). “LUC Public-Key Encryption: A Secure Alternative to RSA”, Dr. Dobb’s Journal, 18 (1): 44–49.
[285] Smith, P. J. and M. J. J. Lennon (1993). “LUC: A New Public Key System”, IFIP Transactions, A 37. pp. 103–117. Proceedings of the IFIP TC11, 9th International Conference on Information Security. Computer Security. Amsterdam: North-Holland Co.
[286] Smith, P. J. and C. Skinner (1995). “A Public-Key Cryptosystem and Digital Signature System Based on the Lucas Function Analogue to Discrete Logarithms”, Advances in Cryptology—ASIACRYPT ’94, Lecture Notes in Computer Science, 917. pp. 357–364. Berlin/Heidelberg: Springer.
[287] Solovay, R. and V. Strassen (1977). “A Fast Monte Carlo Test for Primality”, SIAM Journal of Computing, 6: 84–86.
[288] * Stallings, W. (2006). Cryptography and Network Security, 4th ed. Upper Saddle River, New Jersey: Prentice-Hall.
[289] Stam, M. and A. K. Lenstra (2001). “Speeding up XTR”, Advances in Cryptology—ASIACRYPT 2001, Lecture Notes in Computer Science, 2248. pp. 125–143. Berlin/Heidelberg: Springer.
[290] Stein, A. and E. Teske (2005). “Optimized Baby Step-Giant Step Methods”, Journal of Ramanujan Mathematical Society, 20 (1): 27–58.
[291] * Stinson, D. (2005). Cryptography: Theory and Practice, 3rd ed. Boca Raton, Florida: CRC Press.
[292] Strassen, V. (1969). “Gaussian Elimination Is not Optimal”, Numerische Mathematik, 13: 354–356.
[293] Stucki, D., N. Gisin, O. Guinnard, G. Ribordy and H. Zbinden (2002). “Quantum Key Distribution over 67 km with a Plug & Play System”, New Journal of Physics, 4: 41.1–41.8.
[294] Sun, H.-M., W.-C. Yang and C.-S. Laih (1999). “On the Design of RSA with Short Secret Exponent”, Advances in Cryptology—ASIACRYPT ’99, Lecture Notes in Computer Science, 1716. pp. 150–164. Berlin/Heidelberg: Springer.
[295] Swade, D. (2000). The Cogwheel Brain: Charles Babbage and the Quest to Build the First Computer. London: Little, Brown and Company.
[296] Trappe, W. and L. C. Washington (2006). Introduction to Cryptography with Coding Theory, 2nd ed. Upper Saddle River: Prentice-Hall.
[297] Verheul, E. R. (2001). “Evidence that XTR is More Secure than Supersingular Elliptic Curve Cryptosystems”, Advances in Cryptology—EUROCRYPT 2001, Lecture Notes in Computer Science, 2045. pp. 195–210. Berlin/Heidelberg: Springer.
[298] Washington, L. C. (2003). Elliptic Curves: Number Theory and Cryptography. Boca Raton, Florida: Chapman & Hall/CRC.
[299] Weber, D. (1996). “Computing Discrete Logarithms with the General Number Field Sieve”, Algorithmic Number Theory—ANTS-II, Lecture Notes in Computer Science, 1122. pp. 337–361. Berlin/Heidelberg: Springer.
[300] Weber, D. (1998). “Computing Discrete Logarithms with Quadratic Number Rings”, Advances in Cryptology—EUROCRYPT ’98, Lecture Notes in Computer Science, 1403. pp. 171–183. Berlin/Heidelberg: Springer.
[301] Weber, D. and T. Denny (1998). “The Solution of McCurley’s Discrete Log Challenge”, Advances in Cryptology—CRYPTO ’98, Lecture Notes in Computer Science, 1462. pp. 458–471. Berlin/Heidelberg: Springer.
[302] Western, A. E. and J. C. P. Miller (1968). “Tables of Indices and Primitive Roots”, Royal Mathematical Tables, 9, Cambridge: Cambridge University Press.
[303] Wiedemann, D. H. (1986). “Solving Sparse Linear Equations over Finite Fields”, IEEE Transactions on Information Theory, 32: 54–62.
[304] Wiener, M. J. (1990). “Cryptanalysis of Short RSA Secret Exponents”, IEEE Transactions on Information Theory, 36: 553–558.
[305] Williams, H. C. (1982). “A p + 1 Method for Factoring”, Mathematics of Computation, 39 (159): 225–234.
[306] Yang, L. T. and R. P. Brent (2001). “The Parallel Improved Lanczos Method for Integer Factorization over Finite Fields for Public Key Cryptosystems”, pp. 106–114. Proceedings of the ICPP Workshops 2001, Valencia, Spain, 3–7 September.
[307] Young, A. and M. Yung (1996). “The Dark Side of “Black-Box” Cryptography, or: Should We Trust Capstone?”, Advances in Cryptology—CRYPTO ’96, Lecture Notes in Computer Science, 1109. pp. 89–103. Berlin/Heidelberg: Springer.
[308] Young, A. and M. Yung (1997a). “Kleptography: Using Cryptography Against Cryptography”, Advances in Cryptology—EUROCRYPT ’97, Lecture Notes in Computer Science, 1233. pp. 62–74. Berlin/Heidelberg: Springer.
[309] Young, A. and M. Yung (1997b). “The Prevalence of Kleptographic Attacks on Discrete-Log Based Cryptosystems”, Advances in Cryptology—CRYPTO ’97, Lecture Notes in Computer Science, 1294. pp. 264–276. Berlin/Heidelberg: Springer.
[310] Zheng, Y. (1997). “Digital Signcryption or How to Achieve Cost(Signature & Encryption) << Cost(Signature) + Cost(Encryption)”, Advances in Cryptology—CRYPTO ’97, Lecture Notes in Computer Science, 1294. pp. 165–179. Berlin/Heidelberg: Springer.
[311] Zheng, Y. (1998a). “Signcryption and Its Applications in Efficient Public Key Solutions”, 1997 Information Security Workshop ISW ’97, Lecture Notes in Computer Science, 1397. pp. 291–312. Berlin/Heidelberg: Springer.
[312] Zheng, Y. (1998b). “Shortened Digital Signature, Signcryption, and Compact and Unforgeable Key Agreement Schemes”, contribution to IEEE P1363 Standard for Public Key Cryptography.
[313] Zheng, Y. and H. Imai (1998a). “Efficient Signcryption Schemes on Elliptic Curves”. Proceedings of the IFIP 14th International Information Security Conference IFIP/SEC ’98, Vienna, Austria, September 1998. Chapman & Hall.
[314] Zheng, Y. and H. Imai (1998b). “How to Construct Efficient Signcryption Schemes on Elliptic Curves”, Information Processing Letters, 68: 227–233.
[315] Zheng, Y. and T. Matsumoto (1996). “Breaking Smartcard Implementations of ElGamal Signatures and Its Variants”, presented at the rump session of Advances in Cryptology—ASIACRYPT ’96. Available at http://www.sis.uncc.edu/~yzheng/publications/ (October 2008).
[316] * Zuckerman, H. S., H. L. Montgomery, I. M. Niven and A. Niven (1991). An Introduction to the Theory of Numbers. New York: John Wiley & Sons.
Books marked by stars have Asian editions (at the time of writing this book).





















 , can be represented by the set {0, 1, . . . , n –1}
, can be represented by the set {0, 1, . . . , n –1}
 , can be represented as {a | 0 ≤ a < n, gcd(a, n) = 1}
, can be represented as {a | 0 ≤ a < n, gcd(a, n) = 1}

 , that is,
, that is, 







 , also written as aA and Aa
, also written as aA and Aa )
) , that is,
, that is, 

 )
)


 and
and 

 and
and 

 and
and 





 )
) (in a Dedekind domain)
(in a Dedekind domain)

 , g(a) ≠ 0}
, g(a) ≠ 0}

 , that is,
, that is, 
 over F
over F over F
over F
 , a ↦ aq
, a ↦ aq






 , that is, b = ca for some
, that is, b = ca for some 








 of A
of A






 , same as Jacobian
, same as Jacobian 



 , fm
, fm

 )
)


 )
)
 )
)



 , then she generates the signature
, then she generates the signature  ). Now, since
). Now, since  and
and 
 , find an integer
, find an integer  , we mean that
, we mean that  would denote the set of all (positive) prime numbers. (We prove later that
would denote the set of all (positive) prime numbers. (We prove later that  is an infinite set.) Alternatively, we often describe a set by mentioning the properties of the elements of the set. For example, the set
is an infinite set.) Alternatively, we often describe a set by mentioning the properties of the elements of the set. For example, the set  can also be described as
can also be described as  .
.











 ), if
), if  , then we say that
, then we say that  and refer to
and refer to  as the
as the  and
and  .
. , be a family of sets indexed by
, be a family of sets indexed by  , by
, by  and
and  respectively. The product of
respectively. The product of  , is denoted by
, is denoted by  . When
. When  , we denote the product also as
, we denote the product also as  , we usually say
, we usually say  (or
(or  or
or  ).
). . For example, =, ≤ and ≥ are reflexive relations on
. For example, =, ≤ and ≥ are reflexive relations on  , but the relations ≠, <, > are not.
, but the relations ≠, <, > are not. , but neither of the other relations mentioned above (≠, <, ≥ and so on) is an equivalence relation on
, but neither of the other relations mentioned above (≠, <, ≥ and so on) is an equivalence relation on  .
. , of
, of  , that is,
, that is,  , and for
, and for  ,
,  . The following theorem establishes an important connection between equivalence relations and partitions.
. The following theorem establishes an important connection between equivalence relations and partitions. , let us denote
, let us denote  . Clearly,
. Clearly,  , since
, since  (by reflexivity). Now we show that for
(by reflexivity). Now we show that for  , either [
, either [ . Assume that
. Assume that  . Choose
. Choose  . By construction,
. By construction,  . Then
. Then  . Thus [
. Thus [ , be a partition of
, be a partition of  (but ≠ is not). A partial order ρ on
(but ≠ is not). A partial order ρ on  ,
,  some element
some element  . In this case, we write
. In this case, we write  , then the assignment
, then the assignment  (the non-negative square root) is not a function, because it is not defined for negative values of
(the non-negative square root) is not a function, because it is not defined for negative values of  and
and 
 (with non-negative real and imaginary parts) is a function.
(with non-negative real and imaginary parts) is a function. is called the
is called the  given by
given by  . On the other hand, the function
. On the other hand, the function  given by
given by  . It is denoted by
. It is denoted by  (which means
(which means  given by
given by  that maps
that maps  that maps
that maps  . An element
. An element  is called
is called  ,
,  (resp.
(resp.  ). Let
). Let  such that
such that  (resp.
(resp.  ) for all
) for all  . If an upper bound (resp. a lower bound)
. If an upper bound (resp. a lower bound)  ) subset of
) subset of  ,
,  and
and  with the natural order ≤. Neither of these sets contains a maximal element.
with the natural order ≤. Neither of these sets contains a maximal element.  contains a minimal element 1, but
contains a minimal element 1, but  and
and  do not contain minimal elements. The subset
do not contain minimal elements. The subset  of even natural numbers has two lower bounds, namely 1 and 2, of which 2 is the first element of
of even natural numbers has two lower bounds, namely 1 and 2, of which 2 is the first element of  .
.
 is well-ordered under the natural relation ≤. The set
is well-ordered under the natural relation ≤. The set  can be well ordered by the relation
can be well ordered by the relation  defined as
defined as  . A well ordering of
. A well ordering of  is not known.
is not known. to be the set of all subsets of
to be the set of all subsets of  is called the
is called the  is a set
is a set 
 either
either  is an upper bound of the chain. Then Zorn’s lemma guarantees that
is an upper bound of the chain. Then Zorn’s lemma guarantees that  has at least one maximal element. In this case, the maximal element, namely
has at least one maximal element. In this case, the maximal element, namely  of all proper subsets of
of all proper subsets of  be a partial order on a set
be a partial order on a set  , that is,
, that is,  is the set of all non-empty subsets of
is the set of all non-empty subsets of  such that for every
such that for every  we have
we have  .
. and
and  . Show that:
. Show that:
 , be a family of sets (not necessarily pairwise disjoint). For each
, be a family of sets (not necessarily pairwise disjoint). For each  , consider the set
, consider the set  . Show that the family
. Show that the family  , are pairwise disjoint. The union
, are pairwise disjoint. The union  is called the
is called the  .
.
 (or
(or  or
or  ). Subtraction is not a binary operation on
). Subtraction is not a binary operation on  , since, for example, 2 – 3 is not an element of
, since, for example, 2 – 3 is not an element of  . Division is not a binary operation on
. Division is not a binary operation on  , since division by zero is not defined. Division is a binary operation on
, since division by zero is not defined. Division is a binary operation on  .
. .
. such that
such that  . The element
. The element  , there exists a (unique) element
, there exists a (unique) element  such that
such that  ,
, , then
, then  is an Abelian group under addition. The identity is 0 and the inverse of
is an Abelian group under addition. The identity is 0 and the inverse of  is not a group under multiplication, because though it contains the multiplicative identity 1, multiplicative inverse is not defined for all elements in
is not a group under multiplication, because though it contains the multiplicative identity 1, multiplicative inverse is not defined for all elements in  except ±1.
except ±1. of non-zero rational numbers is a group under multiplication. The identity is 1 = 1/1 and the inverse of
of non-zero rational numbers is a group under multiplication. The identity is 1 = 1/1 and the inverse of  of all
of all  is a group under matrix addition. On the other hand, the set
is a group under matrix addition. On the other hand, the set  of all
of all  is a group under matrix multiplication and is called the
is a group under matrix multiplication and is called the  is another example of a group that is not Abelian (for
is another example of a group that is not Abelian (for 

 , take the remainder of division by
, take the remainder of division by  .)
.)
 . The set
. The set  is a group under multiplication modulo
is a group under multiplication modulo  has a multiplicative inverse modulo
has a multiplicative inverse modulo  . Then
. Then  and is denoted by
and is denoted by  .
. consisting of all
consisting of all  and is commonly referred to as the
and is commonly referred to as the  in
in 

 . It is a group under addition modulo
. It is a group under addition modulo  . In particular, if
. In particular, if  . The set
. The set  , partition
, partition 
 .
. . Clearly,
. Clearly,  , so that
, so that  (See
(See  is the coset
is the coset  for some
for some  for some
for some  .
. by
by  . The map is clearly surjective. Injectivity of
. The map is clearly surjective. Injectivity of  follows from the left cancellation law (
follows from the left cancellation law ( is bijective.
is bijective. . It is clear that any subgroup
. It is clear that any subgroup  , form a group with multiplication defined by (
, form a group with multiplication defined by ( of (
of ( , +) (
, +) ( is Abelian. The coset of
is Abelian. The coset of  is the set
is the set  . The quotient group
. The quotient group  is denoted as
is denoted as  and is essentially the same as the group {0, 1, . . . ,
and is essentially the same as the group {0, 1, . . . ,  , that is, if
, that is, if  , +) to (
, +) to ( , +). More generally, if
, +). More generally, if  is a group homomorphism. In particular, the identity map on any group
is a group homomorphism. In particular, the identity map on any group  to its coset
to its coset  to the quotient group
to the quotient group  . (Also see
. (Also see  is a group automorphism of both (
is a group automorphism of both ( , +) and (
, +) and ( , ·).
, ·). and
and  satisfy
satisfy  .
.
 , we have
, we have  . By
. By  and
and  we have
we have  , since
, since  . Thus, by
. Thus, by  that takes
that takes  , that is,
, that is,  . But then
. But then  is well-defined. It is easy to check that
is well-defined. It is easy to check that  is a group homomorphism. Now
is a group homomorphism. Now  implies
implies  , that is, a Ker
, that is, a Ker  is injective. It is clearly surjective. Thus
is injective. It is clearly surjective. Thus  is bijective and hence an isomorphism from
is bijective and hence an isomorphism from  , be a family of elements of
, be a family of elements of 
 . We call
. We call  , or that the elements
, or that the elements  , generate
, generate  , then
, then  and
and 
 is cyclic if and only if
is cyclic if and only if  (See
(See  for such an
for such an  , ·) is generated by the “primes”
, ·) is generated by the “primes”  , and –1.
, and –1. . Then the subgroup
. Then the subgroup  , and is always Abelian. If
, and is always Abelian. If  , cannot be all distinct, that is,
, cannot be all distinct, that is,  ,
, 
 is the cardinality of the subgroup of
is the cardinality of the subgroup of  is the smallest of the positive integers
is the smallest of the positive integers  . But then
. But then  . Now take any
. Now take any  and write
and write 

 , then
, then  one can compute
one can compute  , we call
, we call  , then
, then  such that ord
such that ord  consisting of all
consisting of all  such that
such that  consists of
consists of  too. Now we define a relation ~ on
too. Now we define a relation ~ on  by (
by ( (that is, (
(that is, ( . The equivalence class of (
. The equivalence class of ( respectively. Then
respectively. Then  , so that
, so that  ,
,  . But then
. But then  (See
(See  , then
, then  such that
such that  with pairwise distinct primes
with pairwise distinct primes  , then
, then  , we have (
, we have ( for all
for all  .
. , then
, then  for all
for all  and
and  .
. .
. .
. ).
). 
 , +) is isomorphic to (
, +) is isomorphic to ( , ·).
, ·). . Show that
. Show that  .
.
 be a homomorphism of (multiplicative) groups. Show that:
be a homomorphism of (multiplicative) groups. Show that:
 is a subgroup of
is a subgroup of  is surjective and
is surjective and  is a subgroup of
is a subgroup of  is surjective and
is surjective and  or to
or to  for some
for some  depending on whether
depending on whether  . Show that
. Show that  is defined to be the set
is defined to be the set  . Show that
. Show that  .
. . Show that ~ is an equivalence relation on
. Show that ~ is an equivalence relation on  is equal to the index [
is equal to the index [ , where
, where  . For each
. For each  can be written
can be written  . Moreover, in that case we have ord
. Moreover, in that case we have ord there are at most
there are at most  can be written uniquely as
can be written uniquely as  , then
, then  .
. .
. . The element 1 is called the
. The element 1 is called the  .
. and consider the powers α, α2, α3, . . . , we eventually get an α
and consider the powers α, α2, α3, . . . , we eventually get an α , we have
, we have  ,
,  ,
,  and
and  are all rings under usual addition and multiplication. Each of
are all rings under usual addition and multiplication. Each of  ,
,  and
and  contains the multiplicative inverse of
contains the multiplicative inverse of  , that have multiplicative inverses, are ±1.
, that have multiplicative inverses, are ±1. denote the set {0, 1, . . . ,
denote the set {0, 1, . . . ,  is a ring under addition and multiplication modulo
is a ring under addition and multiplication modulo  and
and  under addition and multiplication modulo
under addition and multiplication modulo  as we will shortly see.
as we will shortly see. ). The additive (resp. multiplicative) identity in this ring is the constant function 0 (resp. 1).
). The additive (resp. multiplicative) identity in this ring is the constant function 0 (resp. 1). , the largest non-negative integer
, the largest non-negative integer  one can define the ring
one can define the ring  ,
,  ,
,  , be a family of rings, and
, be a family of rings, and  the product of the sets
the product of the sets 
 and
and 

 . It is easy to see that
. It is easy to see that  and
and  . It is called the
. It is called the  . If
. If  , then
, then  is denoted in short by
is denoted in short by  , we have:
, we have: is called a
is called a  ,
,  .
. is called a
is called a  such that
such that  (
( .
. is called
is called  . By this definition, 0 is a nilpotent element in any ring. It is also evident that every nilpotent element in a non-zero ring is a zero-divisor. An example of a non-zero nilpotent element in a ring is
. By this definition, 0 is a nilpotent element in any ring. It is also evident that every nilpotent element in a non-zero ring is a zero-divisor. An example of a non-zero nilpotent element in a ring is  .
. is called
is called  . It is easy to check that 0 is the only element in a ring, that is both nilpotent and idempotent.
. It is easy to check that 0 is the only element in a ring, that is both nilpotent and idempotent. ,
,  ,
,  ,
,  ,
,  . On the other hand, 3 · 5 = 0 in
. On the other hand, 3 · 5 = 0 in  , so
, so  ,
,  and
and  . Note that
. Note that  is not a field, since, for example, 2 does not have a multiplicative inverse in
is not a field, since, for example, 2 does not have a multiplicative inverse in  .
. for prime integers
for prime integers  is a field if and only if
is a field if and only if  ,
,  ,
,  and
and  are rings of characteristic zero. If
are rings of characteristic zero. If  one has
one has  .
. is a subring of
is a subring of  ,
,  and
and  , whereas
, whereas  and
and  are field extensions.
are field extensions. are also in
are also in  ,
,  (cf.
(cf.  , the set of all even integers, is not a subring of
, the set of all even integers, is not a subring of  , though it is a subgroup of (
, though it is a subgroup of ( , +) (
, +) ( of
of  is an additive subgroup of (
is an additive subgroup of ( for all
for all  and
and  .
. ,
,  ,
,  ,
,  ,
,  to denote ideals.
to denote ideals. is an ideal of
is an ideal of  . Conversely,
. Conversely,  is a subring of
is a subring of  but not an ideal. Subrings and ideals are different things.
but not an ideal. Subrings and ideals are different things. contains a unit
contains a unit  and so
and so  for every
for every  . It follows that an ideal
. It follows that an ideal  of
of  contains a unit—a justification for the name.
contains a unit—a justification for the name. denoted by
denoted by  . More generally, for any ring
. More generally, for any ring  , the set
, the set  is an ideal of
is an ideal of  ,
,  , be a family of ideals of
, be a family of ideals of  is an ideal of
is an ideal of  (where
(where  and
and  ) is an ideal of
) is an ideal of  ,
,  , and is denoted by
, and is denoted by  . The union
. The union  is, in general, not an ideal of
is, in general, not an ideal of  is the smallest ideal that contains (the set)
is the smallest ideal that contains (the set)  .
. , a family of elements of
, a family of elements of  , is defined to be the sum
, is defined to be the sum  of the principal ideals
of the principal ideals  . In this case, we also say that
. In this case, we also say that  is generated by
is generated by  . If
. If  is
is  is a
is a  , since
, since  . However, neither 2 nor 3 individually generates the unit ideal of
. However, neither 2 nor 3 individually generates the unit ideal of  . Indeed, using Bézout’s relation (
. Indeed, using Bézout’s relation ( there is a (minimal) generating set of the unit ideal of
there is a (minimal) generating set of the unit ideal of  , that contains exactly
, that contains exactly  is a principal ideal domain.
is a principal ideal domain. be a non-zero ideal of
be a non-zero ideal of  and let
and let  . We claim that
. We claim that  . Clearly,
. Clearly,  . For the converse, take
. For the converse, take  . We can write
. We can write  and since 0 ≤
and since 0 ≤  .
. . In particular, the polynomial rings
. In particular, the polynomial rings  and
and  be a non-zero ideal of
be a non-zero ideal of 
 such that for each
such that for each  the polynomial
the polynomial  . Let
. Let  in
in  is finitely generated, say,
is finitely generated, say,  . This, in particular, implies that
. This, in particular, implies that  for some
for some  . But then the polynomial
. But then the polynomial  belongs to
belongs to  , is non-zero and has degree <
, is non-zero and has degree <  must be finitely generated.
must be finitely generated. of
of  and if
and if  implies
implies  or
or  for
for  . The second condition is equivalent to saying that if
. The second condition is equivalent to saying that if  and
and  , then the product
, then the product  . For a prime integer
. For a prime integer  of
of  is prime. On the other hand, for a composite integer
is prime. On the other hand, for a composite integer  of
of  is not prime. For example,
is not prime. For example,  and
and  , but the product
, but the product  .
. of
of  and if for any ideal
and if for any ideal  satisfying
satisfying  we have
we have  or
or  . This means that there are no non-unit ideals of
. This means that there are no non-unit ideals of  . All the ideals
. All the ideals  of
of  for prime integers
for prime integers  and the principal ideal 〈
and the principal ideal 〈 an ideal of
an ideal of  is a subgroup of the group (
is a subgroup of the group ( is a normal subgroup (
is a normal subgroup ( ,
,  , form an additive Abelian group. We define multiplication on these cosets as
, form an additive Abelian group. We define multiplication on these cosets as  . It is easy to check that this multiplication is well-defined. Furthermore, the set of these cosets, denoted
. It is easy to check that this multiplication is well-defined. Furthermore, the set of these cosets, denoted  , becomes a ring under this addition and multiplication. The ring
, becomes a ring under this addition and multiplication. The ring  is called the
is called the  .
. are
are  (of
(of  ), if
), if  . Thus
. Thus  ) if and only if
) if and only if  , that is,
, that is,  .
. of
of  . Convince yourself that both these definitions are equivalent.
. Convince yourself that both these definitions are equivalent. an ideal of
an ideal of  is a prime ideal of
is a prime ideal of  is an integral domain.
is an integral domain. is a maximal ideal of
is a maximal ideal of  is a field.
is a field. be arbitrary. Then
be arbitrary. Then  is prime ⇔
is prime ⇔  implies
implies  or
or  implies
implies  or
or  is an integral domain.
is an integral domain. be a maximal ideal. Choose
be a maximal ideal. Choose  . Then
. Then  . Consider the ideal
. Consider the ideal  . Since
. Since  is maximal, we must have
is maximal, we must have  . This means that
. This means that  and
and  . Then
. Then  which implies that
which implies that  is a unit in
is a unit in  . That is,
. That is,  is a field.
is a field. be a field. Consider any ideal
be a field. Consider any ideal  of
of  . Choose any
. Choose any  . Then
. Then  . By hypothesis, there exists
. By hypothesis, there exists  such that
such that  , that is,
, that is,  . Hence
. Hence  , that is,
, that is,  .
. , the quotient ring
, the quotient ring  is a field. In particular,
is a field. In particular,  is a maximal ideal of
is a maximal ideal of  .
. is a prime ideal of
is a prime ideal of  ,
,  is an integral domain. But
is an integral domain. But  is finite, so by
is finite, so by  is a field.
is a field. and if
and if  an ideal of
an ideal of  that takes
that takes  is a ring homomorphism.
is a ring homomorphism. . The map
. The map  taking
taking  ).
). that maps
that maps  is an automorphism of the field
is an automorphism of the field  .
. is a unit, then
is a unit, then  be an ideal in
be an ideal in  is an ideal in
is an ideal in  is prime, then
is prime, then  is also prime.
is also prime. ,
,  and
and  with
with  and
and  . Thus
. Thus  is an ideal of
is an ideal of  , then
, then  . If
. If  is prime (in which case
is prime (in which case  and
and  are proper ideals of
are proper ideals of  or
or  . But then
. But then  or
or  .
. of the above proposition is called the
of the above proposition is called the  and is often denoted by
and is often denoted by  . If
. If  .
. is called the
is called the  is called the
is called the  that takes
that takes  is a well-defined ring homomorphism and is bijective. The details are left to the reader. Also see
is a well-defined ring homomorphism and is bijective. The details are left to the reader. Also see  and
and 
 , that is, if there exist
, that is, if there exist  and
and  with
with  . Let
. Let  be ideals in
be ideals in  and
and  are relatively prime. Then
are relatively prime. Then  is isomorphic to the direct product
is isomorphic to the direct product  .
. by
by  for all
for all  . Since
. Since  for all
for all  is a ring homomorphism. In order to show that
is a ring homomorphism. In order to show that  is injective, we let
is injective, we let  . This means that
. This means that  , that is,
, that is,  for all
for all  , that is,
, that is,  . The trickier part is to prove that
. The trickier part is to prove that  is surjective. Let
is surjective. Let  . Let us consider the ideal
. Let us consider the ideal  for each
for each  and
and  with α
with α such that γ
such that γ . (This shows that
. (This shows that  for all
for all  . It follows that
. It follows that  for all
for all  .
. in the last proof does not require the coprimality of
in the last proof does not require the coprimality of 
 requires this condition.
requires this condition. and
and  and
and  . Also let
. Also let  such that
such that  , for example, –31|899, since 899 = (–31) · (–29). By this definition, any element
, for example, –31|899, since 899 = (–31) · (–29). By this definition, any element  divides 0, whereas 0 divides no element other than 0.
divides 0, whereas 0 divides no element other than 0. . In that case, we say that
. In that case, we say that  ,
,  . Two non-zero polynomials
. Two non-zero polynomials  .
. is called a
is called a  is called
is called  the concepts of prime and irreducible elements are the same. This is indeed true for any PID (
the concepts of prime and irreducible elements are the same. This is indeed true for any PID ( a prime. Then
a prime. Then  . Hence
. Hence  is prime if and only if
is prime if and only if  such that
such that  . Consider the ideal
. Consider the ideal  . Since
. Since  , we have
, we have  . By hypothesis,
. By hypothesis,  , a contradiction. So α is a unit. Then 〈
, a contradiction. So α is a unit. Then 〈 such that
such that  such that
such that  , so that
, so that  . But then (
. But then ( can be written as a product
can be written as a product  ,
,  and
and  , where
, where  ,
,  ,
,  is a prime and
is a prime and  ,
,  ,
,  is prime if and only if
is prime if and only if  and
and  . In this ring, we have two essentially different factorizations
. In this ring, we have two essentially different factorizations  of 6 into irreducible elements. The failure of irreducible elements to be primes in such rings is a serious thing to patch up!
of 6 into irreducible elements. The failure of irreducible elements to be primes in such rings is a serious thing to patch up! . We show that
. We show that  . Since
. Since  , there is a maximal ideal
, there is a maximal ideal  containing
containing  (
( . If
. If  is the unit ideal, we are done. Otherwise we choose as before a prime
is the unit ideal, we are done. Otherwise we choose as before a prime  properly containing
properly containing  . Repeating this process we can generate a strictly ascending chain
. Repeating this process we can generate a strictly ascending chain  of ideals of
of ideals of  , but not a PID for
, but not a PID for  have the prime factorizations
have the prime factorizations  and
and  with units
with units  have prime factorizations as in the last paragraph. Any associate of
have prime factorizations as in the last paragraph. Any associate of 
 , is called a
, is called a  .
. not both zero. Then gcd(
not both zero. Then gcd( with
with  such that
such that  , so that
, so that  (not both zero) and
(not both zero) and  such that
such that  and
and  and
and  . Show that
. Show that

 and is called the
and is called the  has no non-zero nilpotent elements. (The ring
has no non-zero nilpotent elements. (The ring  is called the
is called the  , then we say that
, then we say that  is always reduced.)
is always reduced.) .
. .
. and
and  be ideals in
be ideals in  be such that
be such that  need not be an ideal of
need not be an ideal of  and if
and if  is maximal, then
is maximal, then  need not be maximal.
need not be maximal. and
and  be ideals of
be ideals of  . Show that
. Show that  is an ideal of
is an ideal of  and that
and that  .
.  satisfying the following two conditions:
satisfying the following two conditions:
 .
. with
with  such that
such that  is a Euclidean domain with ν(
is a Euclidean domain with ν(
 ,
,  , not both 0.
, not both 0. an ideal. Consider the set
an ideal. Consider the set

 is an ideal of
is an ideal of  . If
. If  , then
, then  is called a
is called a  and
and  of
of  .
. .
. , then
, then  .
. is a prime ideal, then
is a prime ideal, then  .
. if and only if
if and only if  .
. .
. .
. .
. is a sequence
is a sequence  . The ascending chain is called
. The ascending chain is called  such that
such that  for all
for all  . Define a relation ~ on
. Define a relation ~ on  by
by  .
. of integers is the main object of study in this section. We use many results from previous sections to derive properties of integers. Recall that
of integers is the main object of study in this section. We use many results from previous sections to derive properties of integers. Recall that  is a PID and hence a UFD.
is a PID and hence a UFD. be arbitrary and let
be arbitrary and let  to be
to be  . Euclidean division is the basis of the
. Euclidean division is the basis of the  the pair (
the pair ( is a PID, congruence modulo a non-zero ideal of
is a PID, congruence modulo a non-zero ideal of  can be rephrased in terms of congruence modulo a positive integer as follows.
can be rephrased in terms of congruence modulo a positive integer as follows. . Two integers
. Two integers 

 .
. simply by
simply by  ,
,  , we have
, we have  . (3) follows from repeated applications of (1) and (2). For the proof of (4), consider
. (3) follows from repeated applications of (1) and (2). For the proof of (4), consider 
 with gcd(
with gcd(
 (mod
(mod  . We now study the multiplicative group
. We now study the multiplicative group  of the ring
of the ring  . We say that an integer
. We say that an integer  has a
has a  , or, equivalently, if there is an integer
, or, equivalently, if there is an integer  .
. if and only if gcd(
if and only if gcd( is denoted by φ(
is denoted by φ( is called
is called  , so φ(
, so φ( and
and  with gcd(
with gcd( with gcd(
with gcd( , one has
, one has  is a field, Fermat’s little theorem gives the factorization
is a field, Fermat’s little theorem gives the factorization
 ,
,  , can be easily deduced from Fermat’s little theorem. This gives us the following important result.
, can be easily deduced from Fermat’s little theorem. This gives us the following important result. is cyclic.
is cyclic. with deg
with deg  is a field,
is a field,  and
and  , then there exist exactly
, then there exist exactly  of orders dividing
of orders dividing  of orders dividing
of orders dividing  of order
of order  is the canonical prime factorization of
is the canonical prime factorization of  of order
of order  for each
for each  has order
has order  .
. , whence the lemma follows.
, whence the lemma follows. , then φ(
, then φ( be the prime factorization of a positive integer
be the prime factorization of a positive integer  , with pairwise distinct primes
, with pairwise distinct primes 
 . We assume further that
. We assume further that  is defined as:
is defined as:
 .
. .
. ,
,  and
and  .
. . In particular, if
. In particular, if  .
. is a field, the (
is a field, the ( .
. . Canceling
. Canceling  . The largest integer smaller than or equal to
. The largest integer smaller than or equal to  (mod 2). If
(mod 2). If  (mod 2). In particular,
(mod 2). In particular,  , that is, 2 is a quadratic residue mod
, that is, 2 is a quadratic residue mod  is even
is even  , it follows that if
, it follows that if  is even, and if
is even, and if  is odd. Therefore,
is odd. Therefore,  (mod 2).
(mod 2). , where
, where  (mod 2) and
(mod 2) and  (mod 2). Putting
(mod 2). Putting  and, therefore,
and, therefore,  , that is,
, that is,  .
. .
. , where
, where  ,
,  ,
,  and
and  . (Note that we cannot have
. (Note that we cannot have  . Since 360 = 23 · 32 · 5, we have
. Since 360 = 23 · 32 · 5, we have
 as
as
 , then
, then  does not necessarily imply that
does not necessarily imply that  correspond to the same value and meaning.
correspond to the same value and meaning. ,
, , and
, and . In particular, if
. In particular, if  .
.
 , where
, where  . Now for odd integers
. Now for odd integers  (mod 2). Repeated applications of this prove that
(mod 2). Repeated applications of this prove that  (mod 2). To prove that
(mod 2). To prove that  , we proceed in a similar manner and note that for odd integers
, we proceed in a similar manner and note that for odd integers  (mod 2).
(mod 2). with
with  odd primes, then by definition
odd primes, then by definition
 without factoring as follows.
without factoring as follows.
 the density π(
the density π(
 does not rule out the possibility that the error π(
does not rule out the possibility that the error π( . An integer
. An integer  with
with 

 be coprime. The set
be coprime. The set  contains an infinite number of primes.
contains an infinite number of primes. with gcd(
with gcd( , that are ≤
, that are ≤ 
 with gcd(
with gcd(
 .
. and
and  such that
such that  such that
such that  such that
such that  such that
such that  ,
,  is not an integer.
is not an integer.  .
. ) constitute the set
) constitute the set  . In other words, given any integer
. In other words, given any integer  . In other words, given any integer
. In other words, given any integer  are two complete residue systems modulo
are two complete residue systems modulo  is not a complete residue system modulo
is not a complete residue system modulo  .
.
 , show that
, show that  .
.
 ). Show that:
). Show that:
 (that is, if
(that is, if  . An integer
. An integer  and that there are exactly φ(
and that there are exactly φ( with
with  induces a surjective group homomorphism
induces a surjective group homomorphism 
 induces a group homomorphism
induces a group homomorphism  , where
, where  is surjective,
is surjective,  need not be surjective, in general. As an example consider the canonical surjection
need not be surjective, in general. As an example consider the canonical surjection 
 is cyclic for a prime
is cyclic for a prime  .
.
 and
and  are cyclic, but
are cyclic, but  is not cyclic. Conclude that
is not cyclic. Conclude that  is not cyclic for
is not cyclic for  is the direct product of two cyclic subgroups generated by –1 and 5 respectively.
is the direct product of two cyclic subgroups generated by –1 and 5 respectively. , then
, then  is cyclic.
is cyclic.  ,
,  .
.  . To start with, we take a look at these properties. Then we introduce the concept of algebraic elements and discuss how irreducible polynomials can be used to construct (algebraic) extensions of fields. When no confusions are likely, we denote a polynomial
. To start with, we take a look at these properties. Then we introduce the concept of algebraic elements and discuss how irreducible polynomials can be used to construct (algebraic) extensions of fields. When no confusions are likely, we denote a polynomial  by
by  the ring
the ring  is an infinite set of irreducible polynomials of
is an infinite set of irreducible polynomials of  .
. , but reducible over
, but reducible over  , since
, since  ,
,  being a real number but not a rational number. As a second example, the polynomial
being a real number but not a rational number. As a second example, the polynomial  and
and 
 . In fact, we will show shortly that an irreducible polynomial in
. In fact, we will show shortly that an irreducible polynomial in  with
with  , not both zero, and
, not both zero, and  such that
such that  , then two polynomials
, then two polynomials  are said to be
are said to be  with
with  ). Let us investigate the structure of the quotient ring
). Let us investigate the structure of the quotient ring  . If
. If  by
by  with deg
with deg  together with addition and multiplication modulo the polynomial
together with addition and multiplication modulo the polynomial  , that is, the field
, that is, the field  , the ring
, the ring  with 1 ≤ deg
with 1 ≤ deg  with
with  . An element
. An element  is said to be a
is said to be a  and
and  . Then
. Then  . In particular,
. In particular,  . Substituting
. Substituting  with
with  . By
. By  . Clearly, deg
. Clearly, deg  ,
,  , we may think of the roots of
, we may think of the roots of  too. Clearly, all the roots of
too. Clearly, all the roots of  are ±1, whereas the roots of the same polynomial in
are ±1, whereas the roots of the same polynomial in  are ±1, ±i. Indeed we have the following important result.
are ±1, ±i. Indeed we have the following important result. , there exists a field extension
, there exists a field extension  , that is, α is a root of
, that is, α is a root of  and deg
and deg  of degree
of degree  (actually
(actually  ). In this case, we say that
). In this case, we say that  be a non-constant polynomial. A minimal (with respect to inclusion) field extension of
be a non-constant polynomial. A minimal (with respect to inclusion) field extension of  , has the splitting field
, has the splitting field  , whereas the same polynomial, treated as an element of
, whereas the same polynomial, treated as an element of  , has the splitting field
, has the splitting field  (see Equation (
(see Equation ( has a splitting field
has a splitting field  is said to be
is said to be  with
with  is not algebraic over
is not algebraic over  is a root of
is a root of  , which is transcendental (that is, not algebraic) over
, which is transcendental (that is, not algebraic) over 
 .
. is algebraic over
is algebraic over  , since α is a root of the polynomial
, since α is a root of the polynomial  .
. . (We are not going to prove this.) Of course, the concept of algebraic and transcendental elements is heavily dependent on the field
. (We are not going to prove this.) Of course, the concept of algebraic and transcendental elements is heavily dependent on the field 
 .
. , where
, where  and
and  , is a root of the polynomial
, is a root of the polynomial  and hence is algebraic over
and hence is algebraic over  . Therefore, the field extension
. Therefore, the field extension  is algebraic.
is algebraic. is transcendental, since
is transcendental, since  contains elements (like
contains elements (like  .
. be algebraic over
be algebraic over  of least positive degree with
of least positive degree with  be algebraic over
be algebraic over  is a polynomial with
is a polynomial with  .
. . Since
. Since  . Now
. Now  , we have minpolyα,
, we have minpolyα,  ,
,  , but is a root of the quadratic polynomial
, but is a root of the quadratic polynomial  . Therefore,
. Therefore,  , that is,
, that is,  .
. and the field extension
and the field extension  be a non-constant polynomial. By (b),
be a non-constant polynomial. By (b),  . Thus
. Thus  with deg
with deg 
 with
with  be algebraic over
be algebraic over  . Since
. Since  .
. containing
containing  is algebraically closed.
is algebraically closed. is not algebraically closed, since the proper extension
is not algebraically closed, since the proper extension  is algebraic (See
is algebraic (See  is the algebraic closure of
is the algebraic closure of  .
. . Show that:
. Show that:
 .
. , where
, where  , then
, then  (not necessarily all distinct), there exists a unique polynomial
(not necessarily all distinct), there exists a unique polynomial  of degree ≤
of degree ≤  , a gcd of the coefficients of
, a gcd of the coefficients of  with cont
with cont  .
.  the content cont
the content cont  (or, equivalently, if
(or, equivalently, if  the elements cont(
the elements cont( is irreducible over
is irreducible over  with
with  such that
such that  the polynomial
the polynomial  .
.  have degrees ≤ 2.
have degrees ≤ 2.  . An algebraic number
. An algebraic number  . Show that:
. Show that:
 .
. is an algebraic integer, then
is an algebraic integer, then  .
. is an algebraic integer, then for any integer
is an algebraic integer, then for any integer  the complex numbers
the complex numbers  . The
. The  . Show that:
. Show that:
 .
. .
. .
. . (However, if
. (However, if  , then by Fermat’s little theorem
, then by Fermat’s little theorem  be a non-constant polynomial of degree
be a non-constant polynomial of degree  is called the
is called the  .
. and
and  .
. , the product
, the product  and
and  , we have:
, we have: can be written as a finite linear combination
can be written as a finite linear combination  (depending on
(depending on  and
and  for 1 ≤
for 1 ≤  for 0 ≤
for 0 ≤  ,
,  and
and  , 1 ≤
, 1 ≤  .
. , then
, then  . One can easily check that all the generating sets of
. One can easily check that all the generating sets of  . By the maximality of
. By the maximality of  ,
,  , with some
, with some  is a finite linear combination of elements of
is a finite linear combination of elements of  . Since
. Since  ,
,  ,
,  , we then have
, we then have  ,
,  and
and  with some
with some  and, therefore,
and, therefore,  . Since
. Since  ,
,  and
and  , that is, 1
, that is, 1 ,
,  . Note that
. Note that  , with some
, with some  . It follows that
. It follows that  , with some
, with some  , that is,
, that is,  , and dim
, and dim is a vector subspace of
is a vector subspace of  or by
or by  and
and  . Equivalently,
. Equivalently,  and
and  . The set of all
. The set of all  and
and  . A
. A  as
as  , for
, for  ,
,  and
and  . One can readily verify that
. One can readily verify that  is an isomorphism. Conversely, if
is an isomorphism. Conversely, if  is clearly a basis of
is clearly a basis of  ,
,  . If
. If 
 , the set
, the set  is called the
is called the  is called the
is called the  , the dimension of Im
, the dimension of Im  .
. and
and  we have a · (
we have a · ( -module under the scalar multiplication
-module under the scalar multiplication
 , be a family of
, be a family of  of
of  is the subset of the Cartesian product
is the subset of the Cartesian product  consisting only of the tuples
consisting only of the tuples  for which
for which 
 ,
,  ,
,  , is an
, is an  . We say that
. We say that  and
and  and
and  (or equivalently with
(or equivalently with  and
and  ). An
). An  and
and  (and
(and  and Im
and Im  . With these notations we have the isomorphism theorem for modules:
. With these notations we have the isomorphism theorem for modules: of
of  consisting of all finite linear combinations
consisting of all finite linear combinations  with
with  ,
,  and
and  is a submodule of
is a submodule of  is an ideal of
is an ideal of  , one can view
, one can view  under the map
under the map  . One can easily check that this map is well-defined, that is, the product
. One can easily check that this map is well-defined, that is, the product  is independent of the choice of the representative
is independent of the choice of the representative  .
. of
of  ,
,  , are not free.
, are not free. .
. , where
, where be a homomorphism of rings. The ring
be a homomorphism of rings. The ring  for
for  and
and  . This
. This  and
and  one has (
one has ( and
and  , then there is a unique ring homomorphism
, then there is a unique ring homomorphism  taking
taking  . The homomorphism
. The homomorphism  is called the
is called the  and ψ :
and ψ :  .
. of
of  makes
makes  an
an  and if
and if  .
. an ideal of
an ideal of  is again an
is again an  .
. . A subset
. A subset  can be written as a polynomial expression in (finitely many) elements of
can be written as a polynomial expression in (finitely many) elements of  ). We write this as
). We write this as  is
is  of
of  is generated as an
is generated as an  of
of  is not the zero ideal, then
is not the zero ideal, then  . (In this case, we also say that
. (In this case, we also say that  is a
is a  , where
, where  . The
. The  is called the
is called the 
 ,
,  and
and  . Prove the following assertions:
. Prove the following assertions: .
.
 .
. is invertible (as a matrix).
is invertible (as a matrix).
 .
.  ,
,  ,
,  ,
,  , implies
, implies  is called a
is called a  with
with  is not finitely generated as a
is not finitely generated as a  -module.
-module.  is not a free
is not a free  -module.
-module.  is a torsion-free
is a torsion-free  -module.
-module. is an
is an  , we define:
, we define:

 , the following conditions are equivalent:
, the following conditions are equivalent: be of degree
be of degree  that takes
that takes  , and by the isomorphism theorem
, and by the isomorphism theorem  . Since
. Since  are fields. Since Im
are fields. Since Im  contains
contains  ), we have
), we have  , that is,
, that is,  . Finally, notice that [
. Finally, notice that [ , not all 0, such that α0 + α1
, not all 0, such that α0 + α1 with
with  . Clearly,
. Clearly,  with
with  .
. , by hypothesis there is a polynomial
, by hypothesis there is a polynomial  such that 1/
such that 1/ .
. are algebraic over
are algebraic over  , each algebraic over
, each algebraic over  , we have
, we have  . Since
. Since  such that
such that  .
. which is not a solution of any of the equations just mentioned. Define
which is not a solution of any of the equations just mentioned. Define  , we see that
, we see that  . This implies that
. This implies that  and so
and so  too.
too. . Then [
. Then [ , the elements 1,
, the elements 1,  constitute a basis of
constitute a basis of  . If
. If  , then
, then  . Proceeding in this way we get:
. Proceeding in this way we get: of degree
of degree  . To start with, we set up certain notations. An isomorphism μ :
. To start with, we set up certain notations. An isomorphism μ :  . Note also that
. Note also that  is irreducible over
is irreducible over  is irreducible over
is irreducible over  be irreducible over
be irreducible over  and τ(
and τ( . It is now an easy check that τ is a well-defined isomorphism of fields with the desired properties.
. It is now an easy check that τ is a well-defined isomorphism of fields with the desired properties. , the last lemma guarantees the existence of an isomorphism τ :
, the last lemma guarantees the existence of an isomorphism τ :  be a non-constant polynomial and let
be a non-constant polynomial and let  .
. of
of  be a root of μ*(
be a root of μ*( and ν(
and ν( . In particular, τ(
. In particular, τ( .
. splits in
splits in  , we define an indeterminate
, we define an indeterminate  and the ideal
and the ideal  of
of  . We have
. We have  and, therefore, there is a maximal ideal
and, therefore, there is a maximal ideal  of
of  (
( contains at least one root in
contains at least one root in 
 .
. is called an
is called an  fixes all the elements of
fixes all the elements of  for all
for all  ). The set of all
). The set of all  is defined to be the group Aut
is defined to be the group Aut with
with  for every
for every  , is a subfield of
, is a subfield of  there is a
there is a  with
with  .
. . By
. By  and let
and let  of
of  such that τ(
such that τ( , then
, then  is a Galois extension of
is a Galois extension of  .
. , of elements each of which is transcendental over
, of elements each of which is transcendental over  be an endomorphism of
be an endomorphism of  for every
for every  .
.
 has a root
has a root  , show that
, show that  is also a root of
is also a root of  ,
,  and
and  is the automorphism mapping
is the automorphism mapping  , then we conclude that if a complex number
, then we conclude that if a complex number  , then
, then  is also a root of
is also a root of  , where
, where  is an automorphism.
is an automorphism.  is said to be
is said to be  is said to be
is said to be  , and if
, and if  is called
is called  . If every element of
. If every element of  is both separable and purely inseparable if and only if
is both separable and purely inseparable if and only if  . Thus, if char
. Thus, if char  , then
, then  is purely inseparable over
is purely inseparable over  . In particular, show that if
. In particular, show that if  ,
,  , are perfect.
, are perfect. over
over  of field extensions to conclude that if
of field extensions to conclude that if  is an infinite extension of
is an infinite extension of  .
.  .
.  ,
,  and
and  ) do not. We concentrate on some properties of finite fields in this section. As we see later, arithmetic over a finite field
) do not. We concentrate on some properties of finite fields in this section. As we see later, arithmetic over a finite field  .
. . If
. If  , we have
, we have 
 and
and  , there exists a finite field of cardinality
, there exists a finite field of cardinality  and consider
and consider  . Since
. Since  has cardinality
has cardinality  satisfies
satisfies  . Then
. Then  over
over  .
. , where
, where  . We leave the details to the reader (
. We leave the details to the reader ( is the splitting field of
is the splitting field of  , by
, by 
 . Also if
. Also if  with
with  ,
,  . There is a unique intermediate field with
. There is a unique intermediate field with  , if and only if
, if and only if  belongs to the (unique intermediate) field
belongs to the (unique intermediate) field  if and only if
if and only if  . Since
. Since  , we have
, we have  and
and  . Then deg
. Then deg  of
of  , where
, where  is a normal extension.
is a normal extension. .
. is a cyclic group for any finite field
is a cyclic group for any finite field  .
. the polynomial
the polynomial  is simple. In particular,
is simple. In particular,  contains an irreducible polynomial of degree
contains an irreducible polynomial of degree  . Then,
. Then,  with
with  . If
. If  .
. for an arbitrary
for an arbitrary  ,
,  . We have seen how the polynomials
. We have seen how the polynomials  .
. be a finite extension of finite fields and let
be a finite extension of finite fields and let  be a root of the polynomial
be a root of the polynomial  . Since each
. Since each  , we have
, we have  . Therefore,
. Therefore,  . More generally, for each
. More generally, for each  is a root of
is a root of  over
over  is (
is ( for which
for which  have degree δ. So
have degree δ. So  is the smallest field containing (
is the smallest field containing ( and)
and) 
 , whose degrees divide
, whose degrees divide  . By
. By  over
over  divides
divides  . By
. By  is
is  , whose degrees divide
, whose degrees divide  is
is  which is monic and irreducible over
which is monic and irreducible over 
 (with no multiple roots, finite fields being perfect). Since
(with no multiple roots, finite fields being perfect). Since  . Thus
. Thus  as well and, in particular, divides
as well and, in particular, divides  .
. . Let
. Let  is the product of all distinct irreducible factors of
is the product of all distinct irreducible factors of  .
. is defined as
is defined as
 , we have
, we have
 denotes summation over all positive divisors
denotes summation over all positive divisors  , where
, where  . The only non-zero terms in the sum
. The only non-zero terms in the sum  are those corresponding to
are those corresponding to  . From definition, it then follows that
. From definition, it then follows that  .
. to an Abelian group
to an Abelian group  , then
, then
 , then
, then
 of degree
of degree 
 of degree
of degree  and
and  . Applications of the Möbius inversion formula then yield the following formulas:
. Applications of the Möbius inversion formula then yield the following formulas:
 imply that
imply that  But each
But each  . We, therefore, have an independent proof of the second statement in
. We, therefore, have an independent proof of the second statement in 
 of degree
of degree  . These observations have an important bearing for devising efficient algorithms for finding irreducible polynomials over finite fields. (See
. These observations have an important bearing for devising efficient algorithms for finding irreducible polynomials over finite fields. (See  over
over  are
are  . It is interesting to look at the sum and the product of the conjugates of
. It is interesting to look at the sum and the product of the conjugates of  for some
for some  . Since
. Since  , the elements
, the elements  and
and  belong to
belong to  . Since
. Since  and the product
and the product  are elements of
are elements of  too.
too. ,
,  . The
. The  is defined as the sum
is defined as the sum
 is defined as
is defined as
 . For
. For  and
and  . We often drop the suffix
. We often drop the suffix  in these notations, when no ambiguities are likely.
in these notations, when no ambiguities are likely. is a vector space of dimension
is a vector space of dimension  . Let
. Let  -basis of
-basis of  . Each element
. Each element  has a unique representation
has a unique representation 
 , we can also represent the elements of
, we can also represent the elements of  . Thus elements of any finite field can be represented, if we have representations of elements of prime fields. But the set {0, 1, . . . ,
. Thus elements of any finite field can be represented, if we have representations of elements of prime fields. But the set {0, 1, . . . ,  .
. over
over  . In order to illustrate how we can do that, let us choose a priori a fixed monic irreducible polynomial
. In order to illustrate how we can do that, let us choose a priori a fixed monic irreducible polynomial  with deg
with deg  , where
, where  . The elements
. The elements  are linearly independent over
are linearly independent over  , since otherwise we would have a non-zero polynomial of degree less than
, since otherwise we would have a non-zero polynomial of degree less than  -basis 1,
-basis 1,  is called a
is called a  are then polynomials of degrees <
are then polynomials of degrees <  is carried out as the polynomial arithmetic of
is carried out as the polynomial arithmetic of  modulo the irreducible polynomial
modulo the irreducible polynomial  are 0 and 1 with 0 + 0 = 0, 0 + 1 = 1, 1 + 0 = 1, 1 + 1 = 0, 0 · 0 = 1 · 0 = 0 · 1 = 0 and 1 · 1 = 1. In order to represent
are 0 and 1 with 0 + 0 = 0, 0 + 1 = 1, 1 + 0 = 1, 1 + 1 = 0, 0 · 0 = 1 · 0 = 0 · 1 = 0 and 1 · 1 = 1. In order to represent  , we choose the irreducible polynomial
, we choose the irreducible polynomial  . Elements of
. Elements of  are
are  . In order to demonstrate the arithmetic in
. In order to demonstrate the arithmetic in  , we take
, we take  . Their sum in
. Their sum in  is
is 
 is represented by the set {0, 1, 2} with arithmetic operations modulo 3. Since –1 is a quadratic non-residue modulo 3, the polynomial
is represented by the set {0, 1, 2} with arithmetic operations modulo 3. Since –1 is a quadratic non-residue modulo 3, the polynomial  . Therefore, the quotient field
. Therefore, the quotient field  can be used to represent
can be used to represent  ,
, 
 under this representation is then as shown in
under this representation is then as shown in 

 , if the conjugates
, if the conjugates  . For a normal element
. For a normal element  over
over  , the
, the  -basis
-basis  over
over  ). If, in addition,
). If, in addition,  , then
, then  . It can even be shown that primitive normal bases also do exist for all such extensions.
. It can even be shown that primitive normal bases also do exist for all such extensions. in
in 
 and (
and ( . Since
. Since  is prime,
is prime,  , that is,
, that is,  .
. .
. 
 , since
, since  for each
for each  . However, computing the product
. However, computing the product  . For
. For  . It is thus sufficient to look only at the coefficients
. It is thus sufficient to look only at the coefficients  , 0 ≤
, 0 ≤  . From practical considerations (for example, for hardware implementations),
. From practical considerations (for example, for hardware implementations),  .
. , that does not depend on the vector space representation discussed so far, but which is based on the fact that the group
, that does not depend on the vector space representation discussed so far, but which is based on the fact that the group  is cyclic. If we are given a primitive element (that is, a generator) γ of
is cyclic. If we are given a primitive element (that is, a generator) γ of  , then the elements of
, then the elements of  are 0, 1 = γ0, γ, . . . , γ
are 0, 1 = γ0, γ, . . . , γ , whereas γ
, whereas γ . But if
. But if  is not practical nor often feasible. Another difficulty of this representation is that it calls for a primitive element γ. If
is not practical nor often feasible. Another difficulty of this representation is that it calls for a primitive element γ. If  in
in  .
.  with respect to γ =
with respect to γ =  and let
and let  . Prove that (
. Prove that ( .
.  ,
,  and
and  , then
, then  , then
, then  .
. ,
,  and
and  over
over  .
.  and
and  . Use these tables to find a primitive element in each of these fields and a normal element in
. Use these tables to find a primitive element in each of these fields and a normal element in  (over
(over  ).
).

 .
. be of degree
be of degree  . Show that
. Show that  .
. .
.
 is irreducible.
is irreducible. as
as  . Call
. Call  and consider the elements
and consider the elements  . Compute
. Compute  . You should compute the canonical representative of
. You should compute the canonical representative of  , that is, a polynomial in
, that is, a polynomial in  and
and  . Prove the following assertions:
. Prove the following assertions:
 be a finite extension of finite fields. In this exercise, we treat both
be a finite extension of finite fields. In this exercise, we treat both  . (In this notation, Tr
. (In this notation, Tr the linear transformations
the linear transformations  . Show that Tr
. Show that Tr .
.
 as:
as:
 , consider the map
, consider the map  ,
,  is an
is an  -automorphism of
-automorphism of  .
.  is called the
is called the  over
over  .
.
 as a generator.
as a generator.  be irreducible with deg
be irreducible with deg  and let
and let  if and only if
if and only if  into a product of
into a product of  in
in  of the elements of
of the elements of  .
.  -bases of
-bases of  is
is
 the algebraic closure of
the algebraic closure of  the equation
the equation  are the four discrete points (0, 1), (0, 2), (1, 0) and (2, 0). (This solution set does not really look
are the four discrete points (0, 1), (0, 2), (1, 0) and (2, 0). (This solution set does not really look  , the
, the  consisting of all
consisting of all  . For
. For  is also called the
is also called the  , the elements
, the elements  are called the
are called the  over the closure
over the closure  is often abbreviated as
is often abbreviated as  , when the field
, when the field  is an
is an  and is written as
and is written as  satisfying
satisfying  , not both 0, and the conic sections (circles, ellipses, parabolas and hyperbolas) given by
, not both 0, and the conic sections (circles, ellipses, parabolas and hyperbolas) given by  with at least one of
with at least one of  , the set of
, the set of 
 by including two points that are infinitely
by including two points that are infinitely  . An immediate advantage of such a
. An immediate advantage of such a  is that every Cauchy sequence converges in
is that every Cauchy sequence converges in  . But for studying the roots of polynomial equations it is helpful to add only a
. But for studying the roots of polynomial equations it is helpful to add only a  in order to get what is called the
in order to get what is called the  over
over  . Similarly, if we start with the affine plane
. Similarly, if we start with the affine plane 
 of straight lines
of straight lines  over
over  . We also call the
. We also call the  to be the
to be the  to
to  is that in
is that in  any two distinct lines (parallel or not in
any two distinct lines (parallel or not in  ) meet at exactly one point and through any two distinct points of
) meet at exactly one point and through any two distinct points of  passes a unique line.
passes a unique line. by an arbitrary field
by an arbitrary field  . Define the relation ~ on the ‘punctured’
. Define the relation ~ on the ‘punctured’  over
over  such that
such that  . The set of all equivalence classes of ~ is called the
. The set of all equivalence classes of ~ is called the 

 is the equivalence class of a point
is the equivalence class of a point  . The elements
. The elements  constitute
constitute  can be identified with the set of all 1-dimensional vector subspaces (that is lines) of the affine space
can be identified with the set of all 1-dimensional vector subspaces (that is lines) of the affine space  . To argue that this formal definition tallies with the intuitive notion for
. To argue that this formal definition tallies with the intuitive notion for  , consider the affine 3-space
, consider the affine 3-space  referred to by the coordinates
referred to by the coordinates  ,
,  parallel to the
parallel to the  passing through the origin and not parallel to the
passing through the origin and not parallel to the  with points on ε1. These are all the
with points on ε1. These are all the  . On the other hand, the lines passing through the origin and lying in the
. On the other hand, the lines passing through the origin and lying in the  .
. in
in  by setting
by setting 
 in
in  . This observation often proves to be useful (for example, see
. This observation often proves to be useful (for example, see  ,
,  . Any polynomial
. Any polynomial  is a sum of finitely many nonzero terms. The
is a sum of finitely many nonzero terms. The  (or a term
(or a term  ) is defined as
) is defined as  , denoted deg
, denoted deg  is said to be
is said to be  and
and  and
and  . By definition, [
. By definition, [ . This motivates us to define projective plane curves:
. This motivates us to define projective plane curves: and is written as
and is written as  such that
such that  are in one-to-one correspondence with the
are in one-to-one correspondence with the  (that is, zeros with
(that is, zeros with  can be viewed as the homogenization of any of the polynomials
can be viewed as the homogenization of any of the polynomials .
. as the
as the  .
.  with
with  (that is,
(that is,  .
. ,
,  are equal if and only if
are equal if and only if  . We define addition and multiplication of rational functions by the usual rules (
. We define addition and multiplication of rational functions by the usual rules ( , the
, the  . If
. If  is a rational function, then
is a rational function, then  , with
, with  . If
. If  are
are  .
. is said to be
is said to be  (depending on
(depending on  , there exist an integer
, there exist an integer  having neither a zero nor a pole at
having neither a zero nor a pole at  . The integer
. The integer  , the integer
, the integer  is called the
is called the  .
. continues to have only finitely many zeros and poles, but the sum of the orders of
continues to have only finitely many zeros and poles, but the sum of the orders of  .
. (defined over
(defined over  ,
,  ,
,  in
in  at which all of
at which all of  ,
,  and
and  are defined, the point
are defined, the point  . One often uses the notation
. One often uses the notation  .
. is said to be
is said to be  , if there exists a rational function
, if there exists a rational function  (depending on
(depending on  ,
,  and
and  are all defined at
are all defined at  ,
,  and
and  are not all zero and
are not all zero and  . A rational map which is defined at every point of
. A rational map which is defined at every point of  and ψ :
and ψ :  and
and  are identity maps on
are identity maps on  , we define
, we define  under these definitions becomes an Abelian group. If we are given two symbols
under these definitions becomes an Abelian group. If we are given two symbols  , and the sum of formal sums as (
, and the sum of formal sums as ( becomes an Abelian group. These constructions can be generalized as follows:
becomes an Abelian group. These constructions can be generalized as follows:
 , where
, where 
 . This group is called the
. This group is called the  .
. . The former sum is again a point on
. The former sum is again a point on  ,
,  , where
, where  , is called a
, is called a  is called the
is called the  be a divisor. The
be a divisor. The  and is denoted by Supp
and is denoted by Supp  and is denoted as deg
and is denoted as deg  of Div(
of Div( is defined to be the formal sum
is defined to be the formal sum  , where ord
, where ord .
. is called
is called  . We have Div(
. We have Div( . It follows that the set of all principal divisors on
. It follows that the set of all principal divisors on  or Pic0(
or Pic0( or
or  .
. is defined for an arbitrary smooth curve
is defined for an arbitrary smooth curve  . This gives us yet another family of groups on which cryptographic protocols can be built.
. This gives us yet another family of groups on which cryptographic protocols can be built. for a rational function
for a rational function 

 , we can define
, we can define  as above and call a particular subgroup of
as above and call a particular subgroup of  as the
as the  of
of  of respective degrees
of respective degrees  is homogeneous of degree
is homogeneous of degree  .
. as
as

 , (
, ( and
and  is a
is a  is a
is a  . The point
. The point  is a
is a  , each of the curves
, each of the curves  , the
, the  and
and  with deg
with deg  the following two conditions are equivalent:
the following two conditions are equivalent:
 is generated by a set of homogeneous polynomials.
is generated by a set of homogeneous polynomials. , where
, where  for all
for all  the algebraic closure of
the algebraic closure of 
 -rational points (
-rational points (

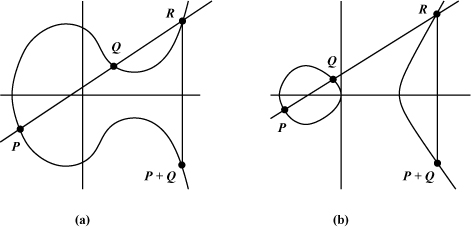
 (
( is denoted by
is denoted by  and
and  such that the substitution of
such that the substitution of 

 transforms
transforms  transforms
transforms 
 allows us to write Equation (
allows us to write Equation (

 .
. ,
,  . Suppose that
. Suppose that  . The admissible change (
. The admissible change ( , that is, the polynomial
, that is, the polynomial  . But then
. But then  .
. . Now we provide an admissible change of variable of the form (
. Now we provide an admissible change of variable of the form ( , that transforms
, that transforms  is algebraically closed,
is algebraically closed,  . This operation provides a group structure on
. This operation provides a group structure on  the point at infinity on
the point at infinity on  , we define
, we define  , that is,
, that is,  serves as the additive identity.
serves as the additive identity. is now defined: if
is now defined: if  , then –
, then – , then –
, then – , the sum
, the sum  .
. .
. . An elementary strategy would be to write explicit formulas for (
. An elementary strategy would be to write explicit formulas for ( has a bijective correspondence with the set
has a bijective correspondence with the set  which takes
which takes  to
to  (more correctly to the equivalence class of the divisor
(more correctly to the equivalence class of the divisor  in
in  ). Furthermore,
). Furthermore,  , where the addition on the left is the addition on
, where the addition on the left is the addition on  . By definition,
. By definition,  is naturally an additive Abelian group. It immediately follows that
is naturally an additive Abelian group. It immediately follows that  .
.
 and for
and for  . We also define
. We also define  and (–
and (– ).
). . We have Δ(
. We have Δ( contains the six points
contains the six points  ,
,  is cyclic with
is cyclic with 






 , where
, where  contains 10 points (including
contains 10 points (including  ). The multiples of the points are listed in
). The multiples of the points are listed in  is again cyclic.
is again cyclic. and
and  must be cyclic (
must be cyclic ( .
.








 as in (2). The supersingular curve
as in (2). The supersingular curve is a cyclic group with 9 points as
is a cyclic group with 9 points as 










 . The set of points
. The set of points  such that
such that  is evidently a subgroup of
is evidently a subgroup of  can be expressed using nice formulas.
can be expressed using nice formulas. , there exist polynomials θ
, there exist polynomials θ , such that for any point
, such that for any point  with
with  we have
we have , are recursively described as:
, are recursively described as:
 for all
for all  ,
,
 . For even
. For even  the polynomials
the polynomials  defined as
defined as
 are easier to handle than the bivariate ones ψ
are easier to handle than the bivariate ones ψ satisfy the inequality:
satisfy the inequality:
 and
and  . Then
. Then  if and only if ψ
if and only if ψ , then
, then  if and only if
if and only if  .
. as follows. If char
as follows. If char  for all
for all  . On the other hand, for char
. On the other hand, for char  (
( . By further abuse of notations, we also call
. By further abuse of notations, we also call  , a finite field of cardinality
, a finite field of cardinality  . If
. If  is a subset of
is a subset of  , the cardinality
, the cardinality  is finite. The next theorem shows that
is finite. The next theorem shows that  is quite close to
is quite close to  , where
, where  . (The integer
. (The integer  lie in a rather narrow interval
lie in a rather narrow interval  . If
. If 
 . Moreover, the values of
. Moreover, the values of  are distributed almost uniformly in the interval
are distributed almost uniformly in the interval  . However, if
. However, if  ), the curve
), the curve  gives
gives  is supersingular if and only if
is supersingular if and only if  , 3, then
, 3, then  is always cyclic. However, the group
is always cyclic. However, the group  is not always cyclic, but is of a special kind. We need a few definitions to explain the structure of
is not always cyclic, but is of a special kind. We need a few definitions to explain the structure of  . The notion of internal direct product for multiplicative groups (
. The notion of internal direct product for multiplicative groups ( ,
,  and integers
and integers  , that is,
, that is,  , where
, where  with integers
with integers 
 is of rank 1 or 2. If the rank is 1, then
is of rank 1 or 2. If the rank is 1, then  is cyclic, otherwise
is cyclic, otherwise  , where
, where  of the group
of the group  , it is easy to compute the order of
, it is easy to compute the order of  as the following theorem suggests.
as the following theorem suggests. satisfy 1 –
satisfy 1 –  the order
the order  .
. , the only points in
, the only points in  ) having
) having  are the roots (distinct by
are the roots (distinct by  with
with  .
. ) in
) in 
 . Show that there exists an elliptic curve
. Show that there exists an elliptic curve  .
.  .
. is defined as
is defined as  . The
. The  . Show that
. Show that  .
. is defined as deg
is defined as deg  one has N(
one has N( .
. for the general Weierstrass equation can be recursively defined as
for the general Weierstrass equation can be recursively defined as

 for the elliptic curve
for the elliptic curve  we have
we have

 for the elliptic curve
for the elliptic curve  . With
. With  show that for
show that for  we have
we have

 :
:
 is not cyclic.
is not cyclic. as
as  , where
, where  . Identify an element
. Identify an element  (where
(where  ) with the integer (
) with the integer ( ,
,  is cyclic.
is cyclic. , that is, two curves over an algebraically non-closed field having the same
, that is, two curves over an algebraically non-closed field having the same  and the identification of elements of
and the identification of elements of  with integers as in
with integers as in  ,
,  is cyclic.
is cyclic. for all
for all  . Show that
. Show that

 , but not so over
, but not so over  .
. . Prove that:
. Prove that:
 has exactly one point of order 2.
has exactly one point of order 2.  is even.
is even. . Prove that:
. Prove that:
 has no points of order 2.
has no points of order 2. is odd.
is odd. , then
, then  is cyclic.
is cyclic.  of characteristic ≠ 2, 3, prove that
of characteristic ≠ 2, 3, prove that  is either cyclic or isomorphic to
is either cyclic or isomorphic to  .
.  ,
,  . Consider the elliptic curve
. Consider the elliptic curve  (or over
(or over  ). Prove that:
). Prove that:
 contains at most three points of order three.
contains at most three points of order three. are precisely the points of order three in
are precisely the points of order three in  .
.
 ,
,  .
. is canonically isomorphic to the group
is canonically isomorphic to the group 

 . The set of
. The set of  is shown in
is shown in  :
: 
 (
( . If char
. If char  simplifies Equation (
simplifies Equation ( . Since
. Since  is a monic polynomial in
is a monic polynomial in 
 ). If char
). If char  , then
, then  . Conversely, if (
. Conversely, if ( , then we have 2
, then we have 2 , we have (∂(
, we have (∂( . But then
. But then  .
. is called the
is called the  are the only points on
are the only points on  , then
, then  to be
to be  itself.
itself. , so that the affine (or projective) coordinate ring of
, so that the affine (or projective) coordinate ring of  . Since
. Since  can be written uniquely as
can be written uniquely as  .
. . Since the
. Since the  . The
. The  . The
. The  .
. , we have:
, we have: .
. .
. .
. can be written in the form
can be written in the form  .
. ,
,  and using
and using  , we need some other concepts.
, we need some other concepts. . From the equation of
. From the equation of  . This means that
. This means that  . The
. The  , we have:
, we have: .
. .
. with
with  , we define
, we define  as:
as: .
. (that is,
(that is,  ).
). is defined as the ratio of the leading coefficients of
is defined as the ratio of the leading coefficients of  be a finite point. Then we can take
be a finite point. Then we can take
 is a uniformizing parameter at the point
is a uniformizing parameter at the point  at infinity (where
at infinity (where  and
and  . The
. The 
 .
. . We define the
. We define the  be a finite point on
be a finite point on  ,
,  . The only points on
. The only points on  . Therefore, if
. Therefore, if  , whereas if
, whereas if  . For any
. For any  , we have ord
, we have ord
 and no finite poles. In this case, the sum of the orders of its zeros is 2
and no finite poles. In this case, the sum of the orders of its zeros is 2 has only finitely many zeros
has only finitely many zeros  and a single pole at
and a single pole at  . Furthermore, if
. Furthermore, if  .
. , the set Prin(
, the set Prin( .
.
 is the set of all cosets of Prin(
is the set of all cosets of Prin( , we represented a coset
, we represented a coset  by the remainder of Euclidean division of
by the remainder of Euclidean division of  , we took polynomials of smallest degrees as canonical representatives of the cosets of 〈
, we took polynomials of smallest degrees as canonical representatives of the cosets of 〈 too, we intend to find such
too, we intend to find such  (resp. in Div(
(resp. in Div( , or equivalently if
, or equivalently if  .
. some
some  with
with  . We start with the following definition.
. We start with the following definition. is called
is called  if
if  is equivalent to some semi-reduced divisor
is equivalent to some semi-reduced divisor  , with
, with  and with
and with  if and only if its opposite
if and only if its opposite  and
and  . Now we can write
. Now we can write 

 . By definition,
. By definition,  , where
, where
 . For that, we need a definition.
. For that, we need a definition. and
and  be two divisors on
be two divisors on 
 be a semi-reduced divisor on
be a semi-reduced divisor on  and
and  (so that deg
(so that deg with the following properties:
with the following properties: .
. with deg
with deg is semi-reduced.
is semi-reduced. by Div(
by Div( by semi-reduced divisors (that is, by pairs of polynomials in
by semi-reduced divisors (that is, by pairs of polynomials in 
 , where
, where  , there exists a unique reduced divisor
, there exists a unique reduced divisor  is defined as the integer
is defined as the integer  .
. . By
. By  is a
is a  be represented as Div(
be represented as Div( for some finite points
for some finite points  satisfies
satisfies  . Since
. Since  as well, we start with the Jacobian
as well, we start with the Jacobian  and define a particular subgroup of
and define a particular subgroup of  to be the Jacobian
to be the Jacobian  of
of  be a
be a  . For a point
. For a point  , the point
, the point  is also in
is also in  . For a divisor
. For a divisor  , we define
, we define  .
.  for all
for all  . The subset of
. The subset of  consisting of divisor classes that have representative divisors defined over
consisting of divisor classes that have representative divisors defined over  ) of
) of  and is called the
and is called the  can be represented uniquely as a reduced divisor Div(
can be represented uniquely as a reduced divisor Div( with deg
with deg is, therefore, a
is, therefore, a  is not smooth and so
is not smooth and so  is smooth, that is, a hyperelliptic curve of genus 2. Find out all the
is smooth, that is, a hyperelliptic curve of genus 2. Find out all the  -rational points on
-rational points on  as
as  , where
, where  .
.
 is not smooth and so
is not smooth and so  is smooth, that is, a hyperelliptic curve of genus 2. Find out all the
is smooth, that is, a hyperelliptic curve of genus 2. Find out all the  -rational points on
-rational points on  . Prove the following assertions:
. Prove the following assertions:
 .
. .
. and
and  .
.
 .
. . Show that either
. Show that either  and that
and that  .
. with
with  ,
,  . Determine Div(
. Determine Div( can be written as
can be written as  for some
for some  and for some rational function
and for some rational function  . This rational function
. This rational function  .
. that maps the residue class of
that maps the residue class of  to the point
to the point  satisfying
satisfying  for some
for some  , is a bijection.
, is a bijection. , not both
, not both  . Show that there is a line
. Show that there is a line  , where
, where  , where σ is defined in Part (b). Show that for
, where σ is defined in Part (b). Show that for  one has
one has  . (This, in particular, proves
. (This, in particular, proves  . Show that
. Show that  (integer sum) and
(integer sum) and  (sum in
(sum in  ).
). ,
,  , be a family (not necessarily finite) of ideals in
, be a family (not necessarily finite) of ideals in  is evidently an ideal in
is evidently an ideal in  is the ideal
is the ideal
 and
and  of
of  , or equivalently if there exist
, or equivalently if there exist  and
and  with
with  is the ideal generated by all elements of the form
is the ideal generated by all elements of the form  for all
for all 
 , the product
, the product 
 . The empty product of ideals is conventionally taken to be the unit ideal
. The empty product of ideals is conventionally taken to be the unit ideal  is the principal ideal 〈a〉, then
is the principal ideal 〈a〉, then  .
. and for any
and for any  we have
we have  .
. such that
such that  is multiplicatively closed, if and only if
is multiplicatively closed, if and only if  is a prime ideal of
is a prime ideal of  , the set {1,
, the set {1,  . (If A is an integral domain, one may take
. (If A is an integral domain, one may take  is denoted as
is denoted as  , define (
, define ( , is invertible. There is a canonical ring homomorphism
, is invertible. There is a canonical ring homomorphism  taking
taking  is
is  can be proved easily and we say that the ring
can be proved easily and we say that the ring  and Q(
and Q( a prime ideal of
a prime ideal of  . Then
. Then  and is usually denoted by
and is usually denoted by  and
and  is called algebraic over
is called algebraic over  . Since
. Since  is said to be
is said to be  . An equation of the form
. An equation of the form  monic, is called an equation of
monic, is called an equation of  and
and  and let
and let  , gcd(
, gcd( . Let (
. Let ( , be an equation of integral dependence of
, be an equation of integral dependence of  . Multiplication by
. Multiplication by  . This is, in general, true for any UFD
. This is, in general, true for any UFD  is integral over
is integral over  .
. , the following conditions are equivalent:
, the following conditions are equivalent: , be an equation of integral dependence of α over
, be an equation of integral dependence of α over  is generated as an
is generated as an  , is an
, is an  generate
generate  , for all
, for all  for some
for some  . Let
. Let  denote the matrix (αδ
denote the matrix (αδ . Multiplication (on the left) by the adjoint of
. Multiplication (on the left) by the adjoint of  shows that
shows that  for all
for all  , we have
, we have  for some
for some  , so that (det
, so that (det  ) · 1 = 0, that is, det
) · 1 = 0, that is, det  . But det
. But det  is a monic polynomial in α of degree
is a monic polynomial in α of degree 
 . By Condition (b) of
. By Condition (b) of  (or more generally any UFD) is a normal domain.
(or more generally any UFD) is a normal domain. is not integrally closed in
is not integrally closed in  or
or  , since, for example,
, since, for example,  is integral over
is integral over  . The integral closure of
. The integral closure of  in
in  is denoted by
is denoted by  . Elements of
. Elements of  are called
are called  be an
be an  such that
such that  . The ring
. The ring 
 be an ascending chain of ideals of
be an ascending chain of ideals of  which is finitely generated by hypothesis. Let
which is finitely generated by hypothesis. Let  . Each
. Each  , that is, there exists
, that is, there exists  such that
such that  and hence
and hence  for every
for every  , that is,
, that is,  .
. be an ideal of
be an ideal of  .
.  . If
. If  , take
, take  . Then
. Then  is finitely generated (since
is finitely generated (since  is so), properly contains
is so), properly contains  and is contained in
and is contained in  . This contradicts the maximality of
. This contradicts the maximality of  in
in  , that is,
, that is,  is finitely generated.
is finitely generated.
 an ideal of
an ideal of  is Noetherian, since the ideals of
is Noetherian, since the ideals of  are in one-to-one inclusion-preserving correspondence with the ideals of
are in one-to-one inclusion-preserving correspondence with the ideals of  be an ideal in
be an ideal in  for some ideal
for some ideal  of
of  is finitely generated, say,
is finitely generated, say,  . It is now (almost) obvious that
. It is now (almost) obvious that  is generated by
is generated by  a prime ideal of
a prime ideal of  is also Noetherian.
is also Noetherian. of polynomials with infinitely many indeterminates
of polynomials with infinitely many indeterminates  of rational numbers. Clearly,
of rational numbers. Clearly,  . The extension degree
. The extension degree  is called the
is called the  should be called a number field. Some others restrict the definition by demanding that one must have
should be called a number field. Some others restrict the definition by demanding that one must have  ; however, fields
; however, fields  are allowed. We restrict the definition further by imposing the condition that
are allowed. We restrict the definition further by imposing the condition that  has to be finite. Our restricted definition is seemingly the most widely accepted one. In this book, we study only the number fields of
has to be finite. Our restricted definition is seemingly the most widely accepted one. In this book, we study only the number fields of  ” to denote
” to denote  and hence
and hence  . The integral closure of
. The integral closure of  in
in  . (
. ( is the Gothic O.) Clearly,
is the Gothic O.) Clearly,  and
and  is an integral domain. We also have
is an integral domain. We also have  , where
, where  is the subset of
is the subset of  comprising all algebraic integers. A
comprising all algebraic integers. A  is
is  , that is,
, that is,  . It is, therefore, customary to call the elements of
. It is, therefore, customary to call the elements of 
 is naturally embedded in
is naturally embedded in  for any number field
for any number field  ) and the rational integers of
) and the rational integers of  ).
). .
. , there exists a rational integer
, there exists a rational integer  such that
such that  . In particular, the quotient field of
. In particular, the quotient field of  is
is  is integrally closed in
is integrally closed in  , that is,
, that is,  is a normal domain.
is a normal domain. , that is, there exists an element
, that is, there exists an element  with a minimal polynomial
with a minimal polynomial  such that deg
such that deg  and
and  . The field
. The field  -vector space of dimension
-vector space of dimension 
 . Thus, without loss of generality, we may take α to be an algebraic integer. In this case, the
. Thus, without loss of generality, we may take α to be an algebraic integer. In this case, the  -basis 1, α, . . . , α
-basis 1, α, . . . , α be an irreducible polynomial of degree
be an irreducible polynomial of degree  is a number field of degree
is a number field of degree  followed by reduction modulo the defining irreducible polynomial
followed by reduction modulo the defining irreducible polynomial  and the elements of
and the elements of  with a field isomorphism
with a field isomorphism  is called a
is called a  .
. has a representation by a pair (
has a representation by a pair ( plays the role of
plays the role of  . Finally, every real number has a decimal (or binary or hexadecimal or . . .) representation.
. Finally, every real number has a decimal (or binary or hexadecimal or . . .) representation. is canonically embedded in
is canonically embedded in  element-wise.
element-wise. for some irreducible polynomial
for some irreducible polynomial  of degree
of degree  is a perfect field (See
is a perfect field (See  of
of  . Thus we get
. Thus we get  of
of  . Now let
. Now let  , such that
, such that  is a
is a  -isomorphism. Let α := σ(
-isomorphism. Let α := σ( . Since
. Since  and α
and α , it follows that
, it follows that  and σ = σ
and σ = σ
 is given, we can distinguish between
is given, we can distinguish between  and
and  by associating these quantities with the elements
by associating these quantities with the elements  and
and  respectively, where
respectively, where  is the
is the  is the imaginary
is the imaginary  .
. for some algebraic
for some algebraic  and seek for the
and seek for the  . One then considers the minimal polynomial
. One then considers the minimal polynomial  ) and proceeds as in the proof of
) and proceeds as in the proof of  as the unique field isomorphism that fixes
as the unique field isomorphism that fixes  and takes α ↦ α
and takes α ↦ α or as
or as  for any
for any  is one’s personal choice. In any case, one will be dealing with the same mathematical object and as long as representation issues are not brought into the scene, all these definitions of a number field are absolutely equivalent.
is one’s personal choice. In any case, one will be dealing with the same mathematical object and as long as representation issues are not brought into the scene, all these definitions of a number field are absolutely equivalent. need not be all distinct as sets. For example, the two embeddings
need not be all distinct as sets. For example, the two embeddings  and
and  of
of  are identical as sets. But the maps
are identical as sets. But the maps  isomorphic to
isomorphic to  or by any root of
or by any root of  of
of  and hence is often called a
and hence is often called a  of
of 
 .)
.) is totally complex and has the signature (0, 1). (The roots of
is totally complex and has the signature (0, 1). (The roots of  .)
.) is neither totally real nor totally complex. The roots of
is neither totally real nor totally complex. The roots of  and
and 

 -module structure of
-module structure of  for a number field
for a number field  , we define the
, we define the  ) as
) as
 ) as
) as
 and
and  . So Tr(α) and N(α) belong to
. So Tr(α) and N(α) belong to  . If α is an algebraic integer, then
. If α is an algebraic integer, then  , that is, Tr(α),
, that is, Tr(α),  .
. and
and  .
. . We call the determinant of the matrix (Tr(β
. We call the determinant of the matrix (Tr(β , it follows that
, it follows that  . Moreover, if β1, . . . , β
. Moreover, if β1, . . . , β .
.
 for some
for some  and let
and let  . We define the discriminant of
. We define the discriminant of  . Computing the determinant of
. Computing the determinant of  , which implies that Δ(
, which implies that Δ( and take formal derivative to get
and take formal derivative to get  , that is,
, that is,  . Therefore,
. Therefore,  , that is,
, that is,
 , the discriminant Δ(β1, . . . , β
, the discriminant Δ(β1, . . . , β -basis of
-basis of  satisfy
satisfy  for
for  . Then Δ(γ1, . . . , γ
. Then Δ(γ1, . . . , γ
 and
and  be two
be two  -bases of
-bases of  and
and  . Then
. Then  , where
, where  to
to  .
. form a
form a  -basis of
-basis of  ,
,  and
and  . Since
. Since  is a
is a  -basis of
-basis of  with
with  . By
. By  , where
, where  . We have seen that
. We have seen that  . Therefore,
. Therefore,  is a
is a  -basis of
-basis of  .
. is a free
is a free  -module of rank
-module of rank  form a
form a  -basis of
-basis of  the elements
the elements  and continue to constitute a
and continue to constitute a  -basis of
-basis of  . Consider the set
. Consider the set  -basis (β1, . . . , β
-basis (β1, . . . , β only. By
only. By  for every
for every  . Choose
. Choose  such that
such that  is minimal in
is minimal in  is linearly independent over
is linearly independent over  .
. is a
is a  -basis of
-basis of  and so trivially over
and so trivially over  too.
too. generates
generates  as a
as a  -module.
-module. such that α =
such that α =  . Without loss of generality, we may assume that
. Without loss of generality, we may assume that  and write
and write  and 0 <
and 0 <  . Furthermore, if
. Furthermore, if
 -basis of
-basis of  . Finally since
. Finally since  has to be a
has to be a  -linear combination of β1, . . . , β
-linear combination of β1, . . . , β -basis of
-basis of 
 ).
). and
and  be two integral bases of
be two integral bases of  -to-
-to- change-of-basis matrix.
change-of-basis matrix.  being an integral basis of
being an integral basis of  and hence
and hence  divides and has the same sign as
divides and has the same sign as  . One can analogously show
. One can analogously show  . Therefore,
. Therefore,  .
. be an integral basis of a number field
be an integral basis of a number field  . By
. By  of
of 
 -basis of the form 1, α, . . . , α
-basis of the form 1, α, . . . , α , as a
, as a  -module, is free of rank
-module, is free of rank  is called
is called  . But the converse is not true, that is, for
. But the converse is not true, that is, for  with
with  , 1, α, . . . , α
, 1, α, . . . , α is monogenic.
is monogenic. for some square-free integer
for some square-free integer  , that is,
, that is,  is a power integral basis of
is a power integral basis of  is
is  are ±
are ± . Therefore, by Equation (
. Therefore, by Equation (
 , that is,
, that is,  is a power integral basis of
is a power integral basis of  is
is  and the conjugates of
and the conjugates of  are ±
are ± . Therefore, Equation (
. Therefore, Equation (
 and
and  its ring of integers. If
its ring of integers. If  is a homomorphism of rings and if
is a homomorphism of rings and if  is a prime ideal of
is a prime ideal of  is a prime ideal of
is a prime ideal of 
 . If
. If  is the inclusion homomorphism, then
is the inclusion homomorphism, then  . For a number field
. For a number field  .
. be a non-zero prime ideal of
be a non-zero prime ideal of  . Then
. Then  lies above a unique non-zero prime ideal of
lies above a unique non-zero prime ideal of  . In particular,
. In particular,  contains a (unique) rational prime.
contains a (unique) rational prime. . If
. If  , then both
, then both  and 0 are prime ideals of
and 0 are prime ideals of  that lie over the zero ideal of
that lie over the zero ideal of  . Since
. Since  ,
,  by
by  is Noetherian.
is Noetherian. constitute an integral basis of
constitute an integral basis of  , that is, the ring homomorphism
, that is, the ring homomorphism  mapping
mapping  is Noetherian and so
is Noetherian and so  , being the quotient of a Noetherian ring (by the isomorphism theorem), is Noetherian too (
, being the quotient of a Noetherian ring (by the isomorphism theorem), is Noetherian too ( of integers of a number field
of integers of a number field  is Noetherian (
is Noetherian ( of
of  is maximal. By
is maximal. By  lies over a non-zero prime ideal
lies over a non-zero prime ideal  of
of  . But
. But  is maximal in
is maximal in  .
.  ,
,  ideals of
ideals of  a prime ideal of
a prime ideal of  . Then
. Then  for some
for some  . In particular, if
. In particular, if  are non-zero prime ideals, then
are non-zero prime ideals, then  for some
for some  .
. for all
for all  and see that
and see that  , a contradiction to that
, a contradiction to that  is prime. The last statement of the lemma follows from the fact that in a DD every non-zero prime ideal is maximal.
is prime. The last statement of the lemma follows from the fact that in a DD every non-zero prime ideal is maximal. of
of  for some
for some  .
. . If
. If  . Then
. Then  is a fractional ideal of
is a fractional ideal of  is a finitely generated
is a finitely generated  , where
, where  ,
,  .
. be such that
be such that  . Now
. Now  ,
,  . Then
. Then  , where
, where  .
. ,
,  of an integral domain
of an integral domain 
 is again a fractional ideal of
is again a fractional ideal of  denote the set of non-zero fractional ideals of
denote the set of non-zero fractional ideals of  . The ideal
. The ideal  . A fractional ideal
. A fractional ideal  of
of  for some fractional ideal
for some fractional ideal  of
of  is a group under multiplication of fractional ideals.
is a group under multiplication of fractional ideals. an (integral) ideal of
an (integral) ideal of  , there exist prime ideals
, there exist prime ideals  of
of  such that
such that  .
. . Since
. Since  . Clearly,
. Clearly,  is a proper non-prime ideal of
is a proper non-prime ideal of  we have
we have  . The ideals
. The ideals  and
and  strictly contain
strictly contain  and, therefore, by the maximality of
and, therefore, by the maximality of  are not in
are not in  each containing
each containing  (and hence
(and hence  ) such that
) such that  and prime ideals
and prime ideals  each containing
each containing  (and hence
(and hence  ) such that
) such that  . Moreover,
. Moreover,  , since
, since  , so that
, so that  , a contradiction. Thus
, a contradiction. Thus  ” was necessary in
” was necessary in  for some
for some  .
. a non-zero prime ideal of
a non-zero prime ideal of  .
. is a fractional ideal of
is a fractional ideal of  .
. . In particular, every non-zero prime ideal in a DD is invertible.
. In particular, every non-zero prime ideal in a DD is invertible. is an
is an  , we have
, we have  .
. , we have
, we have  . In order to prove the strict inclusion, we take any
. In order to prove the strict inclusion, we take any 
 . By
. By  each containing
each containing  (and hence non-zero) such that
(and hence non-zero) such that  . We choose
. We choose  does not contain the product of any
does not contain the product of any  . Now
. Now  and hence by
and hence by  for some
for some  . Since
. Since  , we have
, we have  . On the other hand,
. On the other hand,  and
and  , so that
, so that  , that is,
, that is,  .
. , it follows that
, it follows that 

 . Since
. Since  is a maximal ideal, we then have
is a maximal ideal, we then have  or
or  . Assume that
. Assume that  . We claim that this assumption implies that
. We claim that this assumption implies that  , a contradiction to Part (2). So we must have
, a contradiction to Part (2). So we must have  . For proving the claim, let
. For proving the claim, let  and choose
and choose  . Then we have
. Then we have  and, therefore,
and, therefore,  and so on. For each
and so on. For each  , define the ideal
, define the ideal  . Then
. Then  is an ascending chain of ideals in
is an ascending chain of ideals in  we have
we have  , that is,
, that is,  , that is,
, that is,  with
with  . Since
. Since  . Therefore,
. Therefore,  , as claimed.
, as claimed. in a DD
in a DD  is unique up to permutations of the factors.
is unique up to permutations of the factors. , there is nothing to prove. So let
, there is nothing to prove. So let  be a proper ideal of
be a proper ideal of  contains a product of non-zero prime ideals, then
contains a product of non-zero prime ideals, then 
 ,
,  , of
, of  , such that
, such that  . Let us choose
. Let us choose  is already prime. So take
is already prime. So take  of
of 
 be a maximal ideal containing
be a maximal ideal containing  . We then have
. We then have  and by
and by  for some
for some  . Then
. Then  and so
and so  is an integral ideal of
is an integral ideal of  , that is,
, that is,  contains a product of
contains a product of  is a product of prime ideals, that is,
is a product of prime ideals, that is,  . But then
. But then  is also a product of prime ideals.
is also a product of prime ideals. with prime ideals
with prime ideals  and
and  . Now
. Now  and by
and by  for some
for some  , say,
, say,  . Proceeding in this way shows the desired uniqueness.
. Proceeding in this way shows the desired uniqueness.


 . Here uniqueness is up to permutations of the indexes 1, . . . ,
. Here uniqueness is up to permutations of the indexes 1, . . . ,  of
of  is well-defined and is a fractional ideal of
is well-defined and is a fractional ideal of  . The converse is proved in the following corollary.
. The converse is proved in the following corollary. of a DD
of a DD  with non-zero prime ideals
with non-zero prime ideals  of
of  . Moreover for such a fractional ideal
. Moreover for such a fractional ideal  we have
we have  .
. such that
such that  . But then
. But then  is an integral ideal of
is an integral ideal of  and
and  with
with  . Since each non-zero prime ideal is invertible (
. Since each non-zero prime ideal is invertible ( . This proves the existence of a factorization of
. This proves the existence of a factorization of  . The proof for the uniqueness is left to the reader as an easy exercise. The last assertion follows from a repeated use of
. The proof for the uniqueness is left to the reader as an easy exercise. The last assertion follows from a repeated use of  in
in  . We have
. We have  . One can easily verify that
. One can easily verify that  defined as above is equal to the set
defined as above is equal to the set
 .
. of all non-zero fractional ideals of
of all non-zero fractional ideals of  .
. .
. ,
,  ,
,  fractional ideals of
fractional ideals of  and
and  , then
, then  .
. and
and  be two integral ideals of
be two integral ideals of 
 and write
and write  , if
, if  for some
for some  of
of  is equivalent to the condition
is equivalent to the condition  . Thus for ideals in a DD the term
. Thus for ideals in a DD the term  and
and  be integral ideals of a DD
be integral ideals of a DD  if and only if
if and only if  .
. , we have
, we have  , that is,
, that is,  is an integral ideal of
is an integral ideal of  .
. for some integral ideal
for some integral ideal  , we have
, we have  .
. and
and  with
with  be the prime decompositions of two non-zero integral ideals of a DD
be the prime decompositions of two non-zero integral ideals of a DD  if and only if
if and only if  , where
, where  is an integral ideal of
is an integral ideal of  for some integral ideal
for some integral ideal  of
of  and we can write the prime decomposition
and we can write the prime decomposition  with
with  . By unique factorization, we have
. By unique factorization, we have  to
to  , the notion of unique factorization passes from the element level to the ideal level. If a DD is already a PID, these two concepts are equivalent. (Non-zero prime ideals in a PID are generated by prime elements.) Though every UFD need not be a PID, we have the following result for a DD.
, the notion of unique factorization passes from the element level to the ideal level. If a DD is already a PID, these two concepts are equivalent. (Non-zero prime ideals in a PID are generated by prime elements.) Though every UFD need not be a PID, we have the following result for a DD. of
of  . Then
. Then  . Now
. Now  ) and
) and  ,
,  and for prime elements
and for prime elements  and hence by
and hence by  for some
for some  .
. as
as  , if
, if  is a free
is a free  -module of rank
-module of rank  of
of  . Let β1, . . . , β
. Let β1, . . . , β
 -basis of
-basis of  . Moreover, the discriminant Δ(γ1, . . . , γ
. Moreover, the discriminant Δ(γ1, . . . , γ and is called the
and is called the  , denoted
, denoted  . It follows that
. It follows that  can be generated as an ideal (that is, as an
can be generated as an ideal (that is, as an  -module) by at most
-module) by at most  of
of  there exists
there exists  with
with  .
.
 of
of  is defined as the cardinality of the quotient ring
is defined as the cardinality of the quotient ring  . It is customary to define the norm of the zero ideal as zero.
. It is customary to define the norm of the zero ideal as zero.
 of
of  , the quotient ring
, the quotient ring  is a finite ring. In particular, if
is a finite ring. In particular, if  is a non-zero prime (hence maximal) ideal of
is a non-zero prime (hence maximal) ideal of  , then
, then  is a finite field.
is a finite field. to be the norm of the principal ideal
to be the norm of the principal ideal  . It turns out that this new definition is (almost) the same as the old definition of N(α). More precisely:
. It turns out that this new definition is (almost) the same as the old definition of N(α). More precisely: , we have N(〈α〉) = |N(α)|.
, we have N(〈α〉) = |N(α)|. . Let β1, . . . , β
. Let β1, . . . , β . It is an easy check that αβ1, . . . , αβ
. It is an easy check that αβ1, . . . , αβ . Let σ1, . . . , σ
. Let σ1, . . . , σ is the square of the determinant of the matrix
is the square of the determinant of the matrix
 . Equation (
. Equation ( , we have
, we have  .
. and
and  be ideals in
be ideals in  . Then,
. Then,  .
. and
and  be non-zero ideals of
be non-zero ideals of  . If
. If  is the factorization of
is the factorization of  , then
, then  . In particular, if
. In particular, if  , then
, then  (in
(in  ).
). . Consider a rational prime
. Consider a rational prime  generated by
generated by  . We use the symbol
. We use the symbol  to denote the (prime) ideal of
to denote the (prime) ideal of  generated by
generated by 
 , with pairwise distinct non-zero prime ideals
, with pairwise distinct non-zero prime ideals  of
of  and with
and with  . For each
. For each  , that is,
, that is,  , that is,
, that is,  (
( lies over
lies over  . Conversely if
. Conversely if  is an ideal of
is an ideal of  lying over
lying over  , then
, then  , that is,
, that is,  , that is,
, that is,  , that is,
, that is,  for some
for some  are precisely all the prime ideals of
are precisely all the prime ideals of  that lie over
that lie over  .
. divides
divides  over
over  ) as
) as  . This is the largest
. This is the largest  such that
such that  divides (that is, contains) 〈
divides (that is, contains) 〈 is called the
is called the  of
of  over
over 
 )
) . On the other extreme, if
. On the other extreme, if  and we say that
and we say that  . Finally, if
. Finally, if  . If
. If  .
. , if and only if
, if and only if  .
. is monogenic (that is,
is monogenic (that is,  for some
for some  ) and try to compute the explicit factorization (Equality (
) and try to compute the explicit factorization (Equality ( . In this case,
. In this case,  and let
and let  be the minimal polynomial of α. We then have
be the minimal polynomial of α. We then have  .
.
 as
as  . We write the factorization of
. We write the factorization of  as
as
 and with pairwise distinct irreducible polynomials
and with pairwise distinct irreducible polynomials  . If
. If  , then
, then  . For each
. For each  whose reduction modulo
whose reduction modulo  . Define the ideals
. Define the ideals
 . Since
. Since  , we have
, we have

 are non-zero prime ideals of
are non-zero prime ideals of  with
with  . Thus
. Thus  . On the other hand,
. On the other hand,  , since
, since  . Thus we must have
. Thus we must have  , that is, we have obtained the desired factorization of 〈
, that is, we have obtained the desired factorization of 〈 , then
, then  is monogenic. We take an odd rational prime
is monogenic. We take an odd rational prime  . We have to factorize modulo
. We have to factorize modulo  .
.
 . Then
. Then  , where
, where  . Thus
. Thus  .
.
 . In this case,
. In this case,  , where
, where  and
and  . Thus
. Thus  .
.
 is irreducible in
is irreducible in  and hence
and hence  remains prime in
remains prime in  , that is,
, that is,  .
. .
. . If
. If  and if
and if  . In each case, 2 ramifies in
. In each case, 2 ramifies in  .
. if and only if
if and only if  ,
, , namely ±1. In a general number ring, there may be many more units. For example, all the units in the ring
, namely ±1. In a general number ring, there may be many more units. For example, all the units in the ring  of Gaussian integers are ±1, ±i. There may even be an infinite number of units in a number ring. It can be shown that
of Gaussian integers are ±1, ±i. There may even be an infinite number of units in a number ring. It can be shown that  ,
,  , are all the units of
, are all the units of  . (Note that for all
. (Note that for all  are different from 1.)
are different from 1.)  is a PID. So we can think of factorizations in
is a PID. So we can think of factorizations in  as element-wise factorizations. To start with, we fix a set of pairwise non-associate prime
as element-wise factorizations. To start with, we fix a set of pairwise non-associate prime 
 admits a factorization
admits a factorization  for prime “representatives”
for prime “representatives”  . Thus, in order to complete the picture of factorization, we need machinery to handle the units in a number ring.
. Thus, in order to complete the picture of factorization, we need machinery to handle the units in a number ring. is denoted by
is denoted by  . We know that
. We know that  is an (Abelian) group under (complex) multiplication. Our basic aim now is to reveal the structure of the group
is an (Abelian) group under (complex) multiplication. Our basic aim now is to reveal the structure of the group  .
. -module and, if finitely generated and not free, contains torsion elements, that is, (non-identity) elements of finite order > 1.
-module and, if finitely generated and not free, contains torsion elements, that is, (non-identity) elements of finite order > 1. always contains the element –1 of order 2. The torsion subgroup of
always contains the element –1 of order 2. The torsion subgroup of  is denoted by
is denoted by  . We have
. We have  , where
, where  is a torsion-free group. It turns out that ℜ is a finite group (and hence cyclic) and that
is a torsion-free group. It turns out that ℜ is a finite group (and hence cyclic) and that  is finitely generated and hence free, that is,
is finitely generated and hence free, that is,  for some
for some  . From
. From  has a
has a  -basis consisting of ρ elements, say
-basis consisting of ρ elements, say  can be uniquely expressed as
can be uniquely expressed as  , where ω is a root of unity and
, where ω is a root of unity and  . A set of generators of
. A set of generators of  is called a
is called a  and
and  . If
. If  is 0 + 1 – 1 = 0, that is,
is 0 + 1 – 1 = 0, that is,  , that is,
, that is,  is finite in this case.
is finite in this case. . Also the signature of
. Also the signature of  contains an infinite number of units. Let
contains an infinite number of units. Let  . Then, every unit of
. Then, every unit of  is of the form ±
is of the form ± .
. an ideal of
an ideal of  . (Note that
. (Note that  is an ideal of
is an ideal of  is prime in
is prime in  is prime in
is prime in  is integral over
is integral over  .
. a finitely generated non-zero ideal of
a finitely generated non-zero ideal of  . If
. If  , show that γ is integral over
, show that γ is integral over  a prime ideal of
a prime ideal of  . Show that
. Show that 
 is maximal.
is maximal.  and
and  be as in (b). Further let
be as in (b). Further let  be another prime ideal of
be another prime ideal of  . Show that if
. Show that if  , then
, then  .
.  , then
, then  , is normal if and only if
, is normal if and only if 

 is known to be a PID but not a Euclidean domain. The ring
is known to be a PID but not a Euclidean domain. The ring  is a normal domain (by
is a normal domain (by  are two different factorizations of 6 into irreducible elements.)
are two different factorizations of 6 into irreducible elements.) a prime ideal of
a prime ideal of 
 generated by elements
generated by elements  , and the residue field
, and the residue field  is canonically isomorphic to the quotient field
is canonically isomorphic to the quotient field  of the integral domain
of the integral domain  under the map
under the map  .
. .
. .
. taking
taking  by defining ν(
by defining ν( ,
,  and
and  .)
.) is a DVR for every non-zero prime ideal
is a DVR for every non-zero prime ideal  of
of  are ±1 and ±i.
are ±1 and ±i. are associates to the following:
are associates to the following: , with
, with  for a
for a  for some square-free integer
for some square-free integer 
 is the ring
is the ring  of
of  we have
we have  .
.  be the prime factorization of a non-zero ideal
be the prime factorization of a non-zero ideal  of
of  . Show that
. Show that  .
.  a non-zero (integral) ideal of
a non-zero (integral) ideal of  of
of  is a principal ideal.
is a principal ideal.  is finite.
is finite. is principal.
is principal. and
and  ,
,  , be the prime decompositions of two non-zero ideals
, be the prime decompositions of two non-zero ideals  ,
,  of a DD
of a DD  and
and  as
as

 and lcm
and lcm . Conclude that
. Conclude that  . (Note that if
. (Note that if  .)
.) .
.
 be an ideal of
be an ideal of  . Show that
. Show that  . In particular, every non-zero ideal of
. In particular, every non-zero ideal of  contains a non-zero integer.
contains a non-zero integer.  be a non-zero prime ideal of
be a non-zero prime ideal of  . Prove that
. Prove that  for some
for some  , where
, where  (
( ,
,  ,
,  and
and  . Show that:
. Show that:
 , if and only if N(α) = ±1.
, if and only if N(α) = ±1. , if and only if
, if and only if  is the minimal polynomial of α over
is the minimal polynomial of α over  .
.
 , β ≠ 0, there exist
, β ≠ 0, there exist  such that α =
such that α =  is a Euclidean domain with the Euclidean degree function ν(α) := | N(α)|. (The converse of this is not true. For example, it is known that
is a Euclidean domain with the Euclidean degree function ν(α) := | N(α)|. (The converse of this is not true. For example, it is known that 
 is a Euclidean domain.)
is a Euclidean domain.) there exists
there exists  such that | N(α – β)| < 1.
such that | N(α – β)| < 1. ,
,  ,
,  ,
,  and
and  .
. is not norm-Euclidean.
is not norm-Euclidean. 
 as
as  .
. . Show that
. Show that  and that
and that  is a UFD. Also the only units of
is a UFD. Also the only units of  are ±1.
are ±1. .
.  for
for  . Expand the cube and equate the real and imaginary parts to conclude that we must have
. Expand the cube and equate the real and imaginary parts to conclude that we must have  in bigger and bigger structures, richer and richer in properties.
in bigger and bigger structures, richer and richer in properties.  came in a natural attempt to form quotients, and for some time people believed that that is all about
came in a natural attempt to form quotients, and for some time people believed that that is all about  . It took humankind centuries for completing the picture of the
. It took humankind centuries for completing the picture of the  as the
as the  . A sequence
. A sequence  , of rational numbers is called a
, of rational numbers is called a  such that |
such that | ,
,  (and not
(and not  ) where this happens. Seeing convergence of Cauchy sequences, people were not wholeheartedly happy, because the real polynomial
) where this happens. Seeing convergence of Cauchy sequences, people were not wholeheartedly happy, because the real polynomial  . So the next question that arose was that of
. So the next question that arose was that of  was invented and turned out to be a nice field which is both algebraically closed and complete.
was invented and turned out to be a nice field which is both algebraically closed and complete. strictly bigger than and containing
strictly bigger than and containing  . This is the ring of
. This is the ring of  is the field
is the field  of
of  is complete in the sense of convergence of Cauchy sequences (under the
is complete in the sense of convergence of Cauchy sequences (under the  of
of  exists. We have
exists. We have  , that is, it was necessary and sufficient to add the imaginary quantity
, that is, it was necessary and sufficient to add the imaginary quantity  to get an algebraically closed field. Unfortunately in the case of the
to get an algebraically closed field. Unfortunately in the case of the  is of infinite extension degree over
is of infinite extension degree over  . In addition,
. In addition, 
 complete gives an even bigger field Ω
complete gives an even bigger field Ω of elements
of elements  with the property that
with the property that  . Each
. Each 
 , define another sequence of integers with
, define another sequence of integers with  .
. for every
for every  . In particular, for
. In particular, for  we have
we have  which is a field that we planned to denote also by
which is a field that we planned to denote also by  . It is superfluous to have two notations for the same thing. Many authors, therefore, prefer to avoid the hat and call
. It is superfluous to have two notations for the same thing. Many authors, therefore, prefer to avoid the hat and call  as
as  . For them, our
. For them, our  is
is  and/or
and/or  written explicitly. Let us stick to our old conventions and use hats to remove ambiguities.
written explicitly. Let us stick to our old conventions and use hats to remove ambiguities.
 is canonically embedded in
is canonically embedded in  by the injective map
by the injective map  ,
,  a ring with additive identity
a ring with additive identity  and with multiplicative identity
and with multiplicative identity  . The additive inverse of (
. The additive inverse of ( is an injective ring homomorphism
is an injective ring homomorphism  . In view of this, one often identifies the rational integer
. In view of this, one often identifies the rational integer  . We will also do so, provided that we do not expect to face a danger of confusion. Also note that for
. We will also do so, provided that we do not expect to face a danger of confusion. Also note that for 
 is an integral domain. In order to see why, let us focus our attention on the units of
is an integral domain. In order to see why, let us focus our attention on the units of  . Let us plan to denote
. Let us plan to denote  (the multiplicative group of units of
(the multiplicative group of units of  ) by
) by  , the following conditions are equivalent:
, the following conditions are equivalent:
 .
. . Then for every
. Then for every  we have
we have  , of (rational) integers with
, of (rational) integers with  . Since
. Since  (mod
(mod  .
. can be written uniquely as
can be written uniquely as  and for some
and for some  .
. such that [
such that [ , we have
, we have  . Moreover,
. Moreover,  . This establishes the existence of a factorization
. This establishes the existence of a factorization  is an integral domain.
is an integral domain. . By
. By  and
and  . Then (
. Then ( and hence no
and hence no  of
of  is called the
is called the  can be expressed uniquely as
can be expressed uniquely as  and
and  .
. . Then
. Then  ,
,  and so
and so  . The proof for the uniqueness is left to the reader.
. The proof for the uniqueness is left to the reader. naturally extends to the canonical inclusion
naturally extends to the canonical inclusion  . We can identify
. We can identify  with the rational
with the rational  is
is  . Being a field of characteristic 0,
. Being a field of characteristic 0,  contains an isomorphic copy of
contains an isomorphic copy of  . The map
. The map  gives this isomorphism explicitly. Note that the ring
gives this isomorphism explicitly. Note that the ring  is strictly bigger than
is strictly bigger than  and the field
and the field  is strictly bigger than the field
is strictly bigger than the field  (
( . Let us start with some formal definitions.
. Let us start with some formal definitions. such that for every
such that for every  we have:
we have: such that for all
such that for all  we have:
we have: ,
,  (a condition stronger than the triangle inequality). A norm which is not non-Archimedean is called
(a condition stronger than the triangle inequality). A norm which is not non-Archimedean is called  defines a norm on any field
defines a norm on any field  (or
(or  ). It is customary to denote this norm as | |∞. This norm induces the usual metric topology on
). It is customary to denote this norm as | |∞. This norm induces the usual metric topology on  (or
(or  ) which is at the heart of
) which is at the heart of  under the
under the  on
on  is defined as:
is defined as:
 .
. . If
. If  and
and  . Without loss of generality, we may assume that
. Without loss of generality, we may assume that  . Since
. Since  and
and  . But then |
. But then | , the field
, the field  is canonically embedded in
is canonically embedded in  and thus we have a notion of a
and thus we have a notion of a  . We also have the usual Archimedean distance | |∞
. We also have the usual Archimedean distance | |∞  . We now state an interesting result without a proof, which asserts that any distance on
. We now state an interesting result without a proof, which asserts that any distance on  must be essentially the same as either the usual Archimedean distance or one of the
must be essentially the same as either the usual Archimedean distance or one of the  is equivalent to | |
is equivalent to | | .
. under the norm | |
under the norm | | , it is often customary to restrict ourselves only to these values while talking about the convergence criteria of sequences and series, that is, instead of an infinitesimally small real ε > 0 one can talk about an arbitrarily large
, it is often customary to restrict ourselves only to these values while talking about the convergence criteria of sequences and series, that is, instead of an infinitesimally small real ε > 0 one can talk about an arbitrarily large  with
with  . We say that this sequence
. We say that this sequence  , if given
, if given  there exists
there exists  such that |
such that | for each
for each  . If there exists
. If there exists  with
with 
 .
. is said to be a
is said to be a  , there exists an
, there exists an  such that |
such that | is complete under | |∞. We shortly demonstrate that
is complete under | |∞. We shortly demonstrate that  is complete under | |
is complete under | | from
from  . The field
. The field 
 . The norm ‖ ‖ on
. The norm ‖ ‖ on  of
of  is the
is the  with respect to the Archimedean norm | |∞. On the other hand,
with respect to the Archimedean norm | |∞. On the other hand,  turns out to be the completion of
turns out to be the completion of  with respect to the
with respect to the  itself is a complete field under the
itself is a complete field under the  . Since
. Since  such that |
such that | , we have
, we have  .
. . Since (
. Since ( such that |
such that | is complete with respect to | |
is complete with respect to | | . By
. By  such that |
such that | , we have
, we have , where
, where  satisfies
satisfies  (
( , since |
, since | there exists
there exists  such that |
such that | . It then follows that
. It then follows that  is the completion of
is the completion of  with respect to the norm | |
with respect to the norm | | (under the
(under the  the maximal ideal of
the maximal ideal of  . We now show that
. We now show that  .
. has the
has the  , define a sequence of elements of
, define a sequence of elements of  . We have |α
. We have |α we have |α
we have |α ,
,  , is a well-defined field homomorphism. Being a field homomorphism
, is a well-defined field homomorphism. Being a field homomorphism  is injective.
is injective. is surjective. Take any
is surjective. Take any  . Since (β
. Since (β . We construct the sequence (α
. We construct the sequence (α , that is,
, that is,  .
. (with
(with  ) converges if and only if |
) converges if and only if | . Since
. Since  .
. , whereas the series
, whereas the series  diverges.
diverges. . Before proceeding further, let us introduce a notation. Recall that every
. Before proceeding further, let us introduce a notation. Recall that every 
 . Thus
. Thus  . We denote this by saying that
. We denote this by saying that  , if
, if  of
of  , this congruence notation conforms to that for a general PID. (
, this congruence notation conforms to that for a general PID. ( is a PID by
is a PID by  about an element
about an element 
 , one can define the
, one can define the 
 . Suppose that there exist
. Suppose that there exist  and
and  satisfying:
satisfying: such that
such that  . The given α0
. The given α0 .
. . Since by induction hypothesis
. Since by induction hypothesis 
 and, therefore, there is a unique solution for
and, therefore, there is a unique solution for 
 . The Taylor expansion of
. The Taylor expansion of  ) which implies that
) which implies that  , we then have an
, we then have an  such that α
such that α .
. satisfy
satisfy  , that is, (β – α)(
, that is, (β – α)( . We are given the solution α0 corresponding to
. We are given the solution α0 corresponding to 
 of
of  . So α admits a
. So α admits a  . Suppose that there exists an
. Suppose that there exists an  satisfying:
satisfying: such that
such that 
 is canonically embedded in
is canonically embedded in  and so is
and so is  in
in  . Thus it makes sense to carry out the lifting process for a polynomial
. Thus it makes sense to carry out the lifting process for a polynomial  and for some solution α0 of
and for some solution α0 of  . One solves Formula (
. One solves Formula ( and obtains each
and obtains each  . The limit α belongs to
. The limit α belongs to  and is a solution of
and is a solution of  .
. . Let
. Let  be a solution of
be a solution of  with α ≡ α0 (mod
with α ≡ α0 (mod  is 3 + 1 × 7 + 2 × 72 + 6 × 73 + · · ·. The other square root of α in
is 3 + 1 × 7 + 2 × 72 + 6 × 73 + · · ·. The other square root of α in  can be obtained by starting with α0 = 4.
can be obtained by starting with α0 = 4. of integers
of integers  and
and  . In this case, the
. In this case, the  the expansion of a to the base
the expansion of a to the base  ). In other words, if the
). In other words, if the  not in
not in  . The rational integer –1, for example, has the infinite
. The rational integer –1, for example, has the infinite  . Write the
. Write the  admits a unique expansion of the form
admits a unique expansion of the form  . This notion of
. This notion of  .
.
 , there exist unique
, there exist unique  and unique integers
and unique integers  . Also of
. Also of  ?
? with
with  with
with  . From elementary number theory we know that the congruence
. From elementary number theory we know that the congruence  . Let
. Let 
 ,
,  .
. with
with  . Show also that such an
. Show also that such an  . Thus
. Thus  .
. . Thus
. Thus  .
. .
. .
. is of the form
is of the form  for some
for some  .
. of Part (c) satisfy the infinite strictly descending chain
of Part (c) satisfy the infinite strictly descending chain  .
. is a local domain with the maximal ideal
is a local domain with the maximal ideal  .
. of Part (c) is the principal ideal of
of Part (c) is the principal ideal of  generated by
generated by  . In particular,
. In particular,  is a local PID, that is, a discrete valuation domain (
is a local PID, that is, a discrete valuation domain ( .
. and of –2/5 in
and of –2/5 in  .
.
 is dense in
is dense in  under the
under the  and real ε > 0, there exists
and real ε > 0, there exists  with |
with | is dense in
is dense in  .
.
 is the
is the  in
in  under | |
under | | .
. , then there exists a sequence (
, then there exists a sequence ( converges in
converges in  .
. converges in
converges in  .
. in
in  .
.  does not converge in
does not converge in  .
. and |
and | .
. for any non-zero
for any non-zero  .
.  the sequence (
the sequence ( .
.  ,
,  and
and  are not isomorphic.
are not isomorphic.
 such that α2 =
such that α2 =  .
.
 with α2 + α + 223 = 0 and α ≡ 4 (mod 243).
with α2 + α + 223 = 0 and α ≡ 4 (mod 243).
 . Show that the polynomial
. Show that the polynomial  root in
root in  .
.
 .
.
 . Show that there exists a unique
. Show that there exists a unique  such that α
such that α of
of  is of infinite extension degree over
is of infinite extension degree over  .
.  , the set of all non-negative real numbers), and so on. Unless otherwise specified, we henceforth assume that sample spaces are subsets of
, the set of all non-negative real numbers), and so on. Unless otherwise specified, we henceforth assume that sample spaces are subsets of  .
. , that is, we can
, that is, we can 
 . Typically
. Typically  .
.

 , so that
, so that  .
. of a random variable
of a random variable  . If
. If 

 , as expected.
, as expected.
 and
and  with probability
with probability
 and
and  with probability
with probability
 , the random variable
, the random variable  with probability
with probability
 , one can talk about the probability distribution or density function of the random variable
, one can talk about the probability distribution or density function of the random variable  with Pr(
with Pr(
 , the probabilities
, the probabilities 
 , that is, the random variables
, that is, the random variables  , the conditional probability density function of
, the conditional probability density function of 
 , one can likewise define the conditional probabilities
, one can likewise define the conditional probabilities  .
.




 .
. and Δ := {2, 3}. We have the following a priori probabilities:
and Δ := {2, 3}. We have the following a priori probabilities:
 . This is expected, since the only events (
. This is expected, since the only events ( are the four equiprobable possibilities (1, 2), (1, 3), (2, 3) and (3, 2).
are the four equiprobable possibilities (1, 2), (1, 3), (2, 3) and (3, 2).
 to denote E(
to denote E( . We define the following expectations:
. We define the following expectations:

 . Then
. Then

 and where the
and where the 



 , “size” means
, “size” means  or
or  , “size” refers to area or volume respectively. We assume that the size of
, “size” refers to area or volume respectively. We assume that the size of 

 , where
, where 


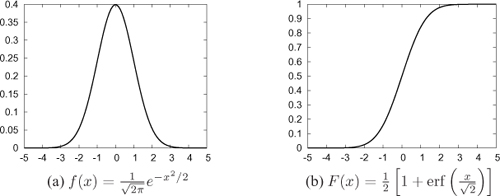
 is the mean of the collection
is the mean of the collection  .
.
 is the mean of the collection
is the mean of the collection  . The mean
. The mean  of a random sample
of a random sample  . Prove that:
. Prove that:
 . What is ρ
. What is ρ

 and with
and with 
 and with
and with  , where λ is a positive real constant. Show that E(
, where λ is a positive real constant. Show that E(
 is said to be
is said to be  .
.
 .
. , and that
, and that  .
. , the ring of integers. We concentrate mostly on elementary properties of integers like
, the ring of integers. We concentrate mostly on elementary properties of integers like  and a positive real constant
and a positive real constant  and real positive constants
and real positive constants  such that
such that  such that
such that  ,
,  ,
, 

 . If
. If  .
. 
 , if there is a polynomial-time algorithm which, given a solution of
, if there is a polynomial-time algorithm which, given a solution of  , then the problem
, then the problem  and
and  , we say that the problems
, we say that the problems  an integer
an integer  , if exponentiations in
, if exponentiations in  ) is not known for many groups.
) is not known for many groups. ,
,  , 106(log
, 106(log  ,
,  ,
,  ,
,
 . Assume that a randomly chosen polynomial in
. Assume that a randomly chosen polynomial in  of degree
of degree  are all reducible. For
are all reducible. For  whose order is
whose order is  , find out if
, find out if  and, if so, find an integer
and, if so, find an integer  and
and  demand
demand  .
. with
with  .
. with
with  , if
, if  .
.
 for some integers
for some integers  and
and  , with
, with  odd, and for
odd, and for  . Since
. Since  is even, this gives us
is even, this gives us  , where τ >
, where τ >  is odd or τ =
is odd or τ =  . In cryptology, we are seemingly more interested in the arithmetic of the rings
. In cryptology, we are seemingly more interested in the arithmetic of the rings  for multiple-precision integers
for multiple-precision integers  by integers between 0 and
by integers between 0 and  . In order to compute
. In order to compute  , we compute the integer sum
, we compute the integer sum  . Similarly, for computing
. Similarly, for computing  , we subtract
, we subtract  , we multiply
, we multiply  is invertible (that is,
is invertible (that is,  ) if and only if gcd(
) if and only if gcd( ,
,  is
is  and
and  . Since
. Since  and since
and since  , we may assume, without loss of generality, that
, we may assume, without loss of generality, that  . Computing the integral power
. Computing the integral power  . Instead, after every multiplication, we reduce the product modulo
. Instead, after every multiplication, we reduce the product modulo  , as
, as  (mod
(mod  (that is, as integer multiplication followed by reduction modulo
(that is, as integer multiplication followed by reduction modulo  , where ρ is the number of bits of
, where ρ is the number of bits of  ,
,  .
. .
. .
. .
. ,
,  .
. .
. .
.

 with
with  , where
, where  (mod
(mod  onto itself. This bijection respects the addition in
onto itself. This bijection respects the addition in  : that is,
: that is,  in
in  . Multiplication in
. Multiplication in  , on the other hand, corresponds to
, on the other hand, corresponds to  , and can be implemented as
, and can be implemented as  and
and  (Montgomery representations of
(Montgomery representations of  ).
). of
of  .
.
 . The subsequent
. The subsequent  (mod
(mod  is a multiple of ℜ
is a multiple of ℜ is an integer. Furthermore, this
is an integer. Furthermore, this  is obtained by adding to
is obtained by adding to  a multiple of
a multiple of  for some integer
for some integer  (mod
(mod  may be bigger than the canonical representative of
may be bigger than the canonical representative of  . Since
. Since  and
and  . Therefore, if
. Therefore, if  exceeds
exceeds  requires ≤
requires ≤  and further optimizations (say, in the form of Karatsuba’s method) can be employed.
and further optimizations (say, in the form of Karatsuba’s method) can be employed. ,
,  .
. ,
,  .
.

 can be represented
can be represented  (depending on
(depending on  . Show that every
. Show that every  can be written
can be written  .
. can be written as
can be written as . Moreover, if we force that
. Moreover, if we force that  ,
,  . Design an algorithm for computing
. Design an algorithm for computing  and in the residue class rings
and in the residue class rings  ,
,  , we address some important computational problems associated with these rings. In this chapter, we restrict ourselves only to those problems that are needed for setting up various cryptographic protocols.
, we address some important computational problems associated with these rings. In this chapter, we restrict ourselves only to those problems that are needed for setting up various cryptographic protocols. ,
,  with gcd(
with gcd( with gcd(
with gcd( , provided that there is at least one such base in
, provided that there is at least one such base in  . Unfortunately, there exist composite integers
. Unfortunately, there exist composite integers  . The smallest Carmichael number is 561 = 3 × 11 × 17.
. The smallest Carmichael number is 561 = 3 × 11 × 17.  ), they are still infinite in number. So a robust primality test requires
), they are still infinite in number. So a robust primality test requires  with gcd(
with gcd( (mod
(mod  is the Jacobi symbol (
is the Jacobi symbol ( (
( , then the chance that
, then the chance that  with gcd(
with gcd( we have
we have  and an acceptable probability δ of failure.
and an acceptable probability δ of failure.
 (
(
 of
of  . If deg
. If deg  ln
ln  ln
ln  with
with  ,
,  , gcd(
, gcd( . Using the Jacobi symbol the value
. Using the Jacobi symbol the value  can be computed efficiently as
can be computed efficiently as 

 , our next task is to compute
, our next task is to compute  with
with  .
.
 is cyclic and has order
is cyclic and has order  has order 2
has order 2 and computing the Legendre symbol
and computing the Legendre symbol  . It is easy to see that
. It is easy to see that  . Furthermore,
. Furthermore,  . Finding a quadratic non-residue in
. Finding a quadratic non-residue in  is the probabilistic part of the algorithm. Since exactly half of the elements of
is the probabilistic part of the algorithm. Since exactly half of the elements of  are quadratic non-residues, one expects to find one after a few random trials. In order to make the exponentiation
are quadratic non-residues, one expects to find one after a few random trials. In order to make the exponentiation  be odd and composite and suppose that there exists (at least) one
be odd and composite and suppose that there exists (at least) one  with
with  .
.  {
{  (mod
(mod  {
{  (mod
(mod  (mod
(mod 
 be odd and composite.
be odd and composite.
 , such that
, such that  (mod
(mod  (mod
(mod  .
.  be a Carmichael number, that is, a composite integer for which
be a Carmichael number, that is, a composite integer for which  . Prove that:
. Prove that:
 be a square-free composite integer, such that (
be a square-free composite integer, such that ( the integers
the integers  and let
and let  ,
,  , be the prime factorization of
, be the prime factorization of  (mod
(mod  (mod
(mod  .
.
 is (canonically) isomorphic to the ring
is (canonically) isomorphic to the ring  . In view of this, we write
. In view of this, we write  generated by
generated by  .
. , 1 <
, 1 <  . Deduce that in this case (
. Deduce that in this case ( .
. and let
and let  be the canonical image of
be the canonical image of  . Show that the ring
. Show that the ring  is isomorphic to the ring
is isomorphic to the ring  .
. for odd
for odd  and for arbitrary
and for arbitrary  .
.
 and integers
and integers  for
for  with
with  .
.
 , have a solution
, have a solution  to the problem of solving the same congruence modulo the prime divisors of
to the problem of solving the same congruence modulo the prime divisors of  of
of 
 . Deduce that the congruence
. Deduce that the congruence  solutions modulo
solutions modulo  for
for  . Specify a strategy to initialize
. Specify a strategy to initialize  is a perfect square.
is a perfect square.  .
. .
. .
. , computes
, computes  .
.  is an integral power of another integer.
is an integral power of another integer. . The arithmetic of the finite fields
. The arithmetic of the finite fields  ,
,  , and
, and  ,
,  , is easy to implement and run efficiently. In view of this, these two kinds of finite fields are most popular in cryptography and we concentrate our algorithmic study on these fields only.
, is easy to implement and run efficiently. In view of this, these two kinds of finite fields are most popular in cryptography and we concentrate our algorithmic study on these fields only. is the quotient ring
is the quotient ring  . In
. In  ,
,  . We recall that the elements of
. We recall that the elements of  are represented as integers from the set {0, 1, . . . ,
are represented as integers from the set {0, 1, . . . ,  is the modulo
is the modulo  is odd. The fields of even characteristic that we will study are the non-prime fields
is odd. The fields of even characteristic that we will study are the non-prime fields  .
. for an irreducible polynomial
for an irreducible polynomial  . In that case, an element of
. In that case, an element of  has the canonical representation as a polynomial
has the canonical representation as a polynomial  , of degree <
, of degree <  is the same operation in
is the same operation in  followed by reduction modulo the
followed by reduction modulo the  .
.
 (or any field) is identified by its coefficients of which only finitely many are non-zero. Thus for storing a polynomial
(or any field) is identified by its coefficients of which only finitely many are non-zero. Thus for storing a polynomial  is representable as 101 or as 0101 or as 00101 or · · ·.
is representable as 101 or as 0101 or as 00101 or · · ·. can be viewed as the set {0, 1} with operations modulo 2, a polynomial in
can be viewed as the set {0, 1} with operations modulo 2, a polynomial in  is essentially a bit string unique up to insertion (and deletion) of leading zero bits. As in the case of multiple-precision integers, we pack these coefficients in an array of 32-bit words and maintain the number of coefficients
is essentially a bit string unique up to insertion (and deletion) of leading zero bits. As in the case of multiple-precision integers, we pack these coefficients in an array of 32-bit words and maintain the number of coefficients  , in addition to being compact, facilitates efficient implementation of arithmetic functions. As we will shortly see, we need not often extract the individual coefficients of a polynomial but apply bit operations on entire words to process 32 coefficients simultaneously per operation. We usually do not need polynomials of degrees > 4096 for cryptographic applications. It is, therefore, sufficient to declare a
, in addition to being compact, facilitates efficient implementation of arithmetic functions. As we will shortly see, we need not often extract the individual coefficients of a polynomial but apply bit operations on entire words to process 32 coefficients simultaneously per operation. We usually do not need polynomials of degrees > 4096 for cryptographic applications. It is, therefore, sufficient to declare a 
 is the same as the XOR (⊕) of two bits. Applying this bit operation on words α
is the same as the XOR (⊕) of two bits. Applying this bit operation on words α as in Equation (
as in Equation ( as in Equation (
as in Equation ( can be computed very easily using the fact that
can be computed very easily using the fact that is implemented in
is implemented in  as in Equation (
as in Equation ( . We again start with the non-zero polynomials
. We again start with the non-zero polynomials 
 with
with 
 . If
. If  (not necessarily irreducible), we represent elements of
(not necessarily irreducible), we represent elements of  as polynomials in
as polynomials in  of degrees <
of degrees <  . The product ab is computed by first computing the product ab in
. The product ab is computed by first computing the product ab in  and then computing the remainder of Euclidean division of this product by
and then computing the remainder of Euclidean division of this product by  ). In that case, extended gcd computation gives us polynomials
). In that case, extended gcd computation gives us polynomials  . Finally, for
. Finally, for  the computation of the modular exponentiation
the computation of the modular exponentiation  .
. satisfying
satisfying , we need an irreducible polynomial
, we need an irreducible polynomial  of degree
of degree 
 . Although we are interested only in the case
. Although we are interested only in the case  (over
(over  ). If
). If  of degrees dividing
of degrees dividing  of degree
of degree  of degree
of degree  .
. ,
,  of degree
of degree 

 . We have seen how to implement arithmetic in
. We have seen how to implement arithmetic in  and hence by
and hence by  too. If
too. If  is an irreducible polynomial of degree
is an irreducible polynomial of degree  and we implement the arithmetic of
and we implement the arithmetic of  as the polynomial arithmetic of
as the polynomial arithmetic of  modulo
modulo  . Now, for
. Now, for  and a monic irreducible polynomial
and a monic irreducible polynomial  we have a representation
we have a representation  . Instead of having such a two-way representation of
. Instead of having such a two-way representation of  we may also represent
we may also represent  as
as  , where
, where  is a monic irreducible polynomial of degree
is a monic irreducible polynomial of degree 
 can be made more efficient than the modular polynomial arithmetic of
can be made more efficient than the modular polynomial arithmetic of  . For example, we might precompute tables of arithmetic operations of
. For example, we might precompute tables of arithmetic operations of  and use table lookups for performing the coefficient arithmetic of
and use table lookups for performing the coefficient arithmetic of  . This demands O(
. This demands O( and precompute a table that maps
and precompute a table that maps  can be computed in time O(1) using table lookups. If, in addition, we store the Zech’s logarithm table (
can be computed in time O(1) using table lookups. If, in addition, we store the Zech’s logarithm table (
 can also be performed in O(1) time with table lookup. Both these three tables take O(
can also be performed in O(1) time with table lookup. Both these three tables take O( so that secured protocols on
so that secured protocols on  can be developed. We first note that such protocols are usually based on the apparent intractability of the so-called
can be developed. We first note that such protocols are usually based on the apparent intractability of the so-called  with either
with either  . By the
. By the  is representable using O(|
is representable using O(| .
. is that the size |
is that the size | is cyclic (
is cyclic ( .
.  is a generator of
is a generator of  ,
,  ,
,  and an element
and an element  .
. .
. can be bypassed as follows.
can be bypassed as follows.
 , the security of cryptographic protocols over
, the security of cryptographic protocols over 
 will do. So assume
will do. So assume  and let
and let  . Now,
. Now,  being a field, the polynomial
being a field, the polynomial  can have at most (
can have at most ( (that is, in
(that is, in  ) and hence the probability that
) and hence the probability that  and an (odd) prime factor
and an (odd) prime factor  of multiplicative order
of multiplicative order  \ {0, ±1}.
\ {0, ±1}. is to be factored. Without loss of generality, we can take
is to be factored. Without loss of generality, we can take  and that of
and that of 
 , though in some cases we have to treat the case
, though in some cases we have to treat the case  .
. a non-constant monic polynomial. Then the polynomial
a non-constant monic polynomial. Then the polynomial  be the factorization of
be the factorization of  , with
, with  and with
and with  . In order to determine v
. In order to determine v for some
for some  . If
. If  , then v
, then v ,
,  , where each
, where each  , so that
, so that  ,
,  , is square-free.
, is square-free. is now almost immediate except for one subtlety, namely, the consideration of the case
is now almost immediate except for one subtlety, namely, the consideration of the case  . Then
. Then  , that is, if
, that is, if  , since
, since  for all
for all  ,
,  .
.
 be a square-free polynomial of degree
be a square-free polynomial of degree 


 . Thus a few (at most
. Thus a few (at most  are of rather large degrees. But since
are of rather large degrees. But since  , keeping polynomials reduced modulo
, keeping polynomials reduced modulo  .
. ), but they optimize the computation of the polynomials
), but they optimize the computation of the polynomials  rem
rem  , one may break the interval 1, . . . ,
, one may break the interval 1, . . . ,  ,
,  .
.  and let
and let  . Then
. Then  , then
, then  .
. until one gets
until one gets  . One then recursively applies the algorithm to
. One then recursively applies the algorithm to  and
and  . It is sufficient to choose
. It is sufficient to choose  splits
splits  . Compute a primitive element in this representation.
. Compute a primitive element in this representation.
 given that of
given that of  .
.
 ),
),  a non-constant polynomial and let
a non-constant polynomial and let  , show that
, show that  . Thus,
. Thus,  and has the same roots (over
and has the same roots (over  ) as
) as  be arbitrary. Show that
be arbitrary. Show that ) in probabilistic polynomial time.
) in probabilistic polynomial time.  .
.
 .
. with
with  .
.
 be arbitrary. Show that
be arbitrary. Show that ) in probabilistic polynomial time. Write an algorithm to compute all the roots of
) in probabilistic polynomial time. Write an algorithm to compute all the roots of  .
. that splits over
that splits over  .
. with
with  .
. .
. , where
, where  is represented as
is represented as 
 and of the same degree
and of the same degree  . Consider the two representations
. Consider the two representations  . In this exercise, we study how we can compute an isomorphism between these two representations. The polynomial
. In this exercise, we study how we can compute an isomorphism between these two representations. The polynomial  . Consider a root α = α(
. Consider a root α = α( . Show that 1, α, α2, . . . , α
. Show that 1, α, α2, . . . , α -basis of (the
-basis of (the  -vector space)
-vector space)  . For
. For  with
with  , and consider the matrix
, and consider the matrix  that maps (the equivalence class of)
that maps (the equivalence class of)  -isomorphism.
-isomorphism.
 . We have seen that the elements of
. We have seen that the elements of  can be represented as integers between 0 and
can be represented as integers between 0 and 
 of degree
of degree  of degrees <
of degrees <  gives a representation of elements of
gives a representation of elements of  as integers between 0 and
as integers between 0 and  the
the  is known. Devise an algorithm that computes the order of an arbitrary element in
is known. Devise an algorithm that computes the order of an arbitrary element in  be a monic square-free polynomial of degree
be a monic square-free polynomial of degree  monic, non-constant and irreducible. (Note that
monic, non-constant and irreducible. (Note that 
 .
.  -vector space of dimension
-vector space of dimension  that maps
that maps  is an
is an  -linear transformation with Ker
-linear transformation with Ker  , and so the nullity of
, and so the nullity of  equals the number of irreducible factors of
equals the number of irreducible factors of  with respect to the basis 1,
with respect to the basis 1,  .
. , then
, then
 .
. stems from two considerations. First, discrete logarithms in
stems from two considerations. First, discrete logarithms in  can be computed in subexponential time. This demands
can be computed in subexponential time. This demands  is carefully chosen, the only known algorithms for solving the discrete logarithm problem in
is carefully chosen, the only known algorithms for solving the discrete logarithm problem in  are fully exponential in lg
are fully exponential in lg  , whereas there are many elliptic curve groups
, whereas there are many elliptic curve groups  (over the same field
(over the same field  ) with orders ranging from
) with orders ranging from  to
to  . If a particular group
. If a particular group  is compromised, we can switch to another curve without changing the base field
is compromised, we can switch to another curve without changing the base field  .
. . Then we concentrate on some algorithms for counting the order
. Then we concentrate on some algorithms for counting the order  . Knowledge of this order is necessary to find out cryptographically suitable elliptic curves. We consider only prime fields
. Knowledge of this order is necessary to find out cryptographically suitable elliptic curves. We consider only prime fields  or fields
or fields  of characteristic 2. So we assume that the curve is defined by Equation (
of characteristic 2. So we assume that the curve is defined by Equation ( . Since
. Since  corresponds to two elements
corresponds to two elements  and since each element of
and since each element of  can be represented using ≤
can be represented using ≤  can be implemented using a few operations in the ground field
can be implemented using a few operations in the ground field  .
. and
and  (or, more generally, for
(or, more generally, for  ) can be performed using a repeated-double-and-add algorithm similar to the repeated-square-and-multiply
) can be performed using a repeated-double-and-add algorithm similar to the repeated-square-and-multiply  is another useful problem. If
is another useful problem. If  and substitute
and substitute  defined by Equation (
defined by Equation ( is chosen by first choosing a random
is chosen by first choosing a random  . Substituting
. Substituting  . This equation has two or zero solutions depending on whether the absolute trace
. This equation has two or zero solutions depending on whether the absolute trace 
 is a solution, since Tr(α) =
is a solution, since Tr(α) =  with Tr(β) = 1. Since Tr is a homomorphism of the additive groups
with Tr(β) = 1. Since Tr is a homomorphism of the additive groups  and Tr(1) = 1, exactly half of the elements of
and Tr(1) = 1, exactly half of the elements of  have trace 1. Therefore, a desired β can be quickly found out by selecting elements of
have trace 1. Therefore, a desired β can be quickly found out by selecting elements of  at random and computing traces of these elements. Now, it is easy to check that
at random and computing traces of these elements. Now, it is easy to check that  gives a solution of
gives a solution of  with
with  . A knowledge of
. A knowledge of  . By the prime number theorem (
. By the prime number theorem ( contains a point of order 2 (a point of the form (
contains a point of order 2 (a point of the form ( . We compute the polynomial gcd
. We compute the polynomial gcd  and conclude that
and conclude that 
 ,
,  .
. .
.
 .
.
 the set of all
the set of all  (
( that maps
that maps  and
and  to (
to ( . If we restrict our attention only to the group
. If we restrict our attention only to the group  , where
, where  for all
for all  .
.
 (instead of in
(instead of in  ), where
), where  modulo
modulo  ) and is thus a deterministic polynomial-time algorithm for the point-counting problem. Essentially the same algorithm works for fields
) and is thus a deterministic polynomial-time algorithm for the point-counting problem. Essentially the same algorithm works for fields  with
with  . This speed-up is achieved by working in the ring
. This speed-up is achieved by working in the ring  , where
, where  of small characteristic
of small characteristic  of characteristic 2. This algorithm has enabled point-counting over fields as large as
of characteristic 2. This algorithm has enabled point-counting over fields as large as  . A generic description of the Satoh–FGH algorithm now follows after the introduction of some mathematical notions. Though our practical interest concentrates on the fields
. A generic description of the Satoh–FGH algorithm now follows after the introduction of some mathematical notions. Though our practical interest concentrates on the fields  only, we consider curves over a general
only, we consider curves over a general  with
with  of
of  , and the residue field
, and the residue field  is isomorphic to
is isomorphic to  .
. as a polynomial algebra over
as a polynomial algebra over  . We analogously define the
. We analogously define the  , where
, where  . The elements of
. The elements of  can be viewed as polynomials of degrees <
can be viewed as polynomials of degrees <  are polynomial operations in
are polynomial operations in  modulo the defining polynomial
modulo the defining polynomial  is canonically embedded in the ring
is canonically embedded in the ring  (consider constant polynomials).
(consider constant polynomials). turns out to be a discrete valuation ring with maximal ideal
turns out to be a discrete valuation ring with maximal ideal  , and the residue field
, and the residue field  is isomorphic to
is isomorphic to  .
. is defined as the map that takes a
is defined as the map that takes a  , and can be canonically extended to a map
, and can be canonically extended to a map  by π(α0 + α1
by π(α0 + α1 .
. is the map that takes 0 ↦ 0 and 0 ≠
is the map that takes 0 ↦ 0 and 0 ≠  satisfying π(ω(
satisfying π(ω( is defined to be the unique sequence
is defined to be the unique sequence  such that α has the
such that α has the  .
. ,
,  as follows. Let
as follows. Let  have the semi-Witt decomposition
have the semi-Witt decomposition  . Then,
. Then,  is the unique element
is the unique element  having the semi-Witt decomposition
having the semi-Witt decomposition  One can show that
One can show that  . We have
. We have  and similarly
and similarly  .
. . Application of
. Application of  to the coefficients of
to the coefficients of  whose rational points are
whose rational points are  ,
,  , where
, where  , together with the point at infinity. We may apply
, together with the point at infinity. We may apply  to
to  and so on. Since
and so on. Since 
 :
:
 , application of
, application of 
 :
:
 to a curve ε over
to a curve ε over  . Explaining that requires some more mathematical concepts:
. Explaining that requires some more mathematical concepts: at infinity of
at infinity of  at infinity of
at infinity of  to
to  . A non-zero isogeny is also called a
. A non-zero isogeny is also called a  of an isogeny
of an isogeny  is defined to be the set
is defined to be the set  . For every non-constant isogeny
. For every non-constant isogeny  , the kernel ker
, the kernel ker  is a
is a  ,
,  ,
,  ,
,  . If
. If  , there exists a unique polynomial
, there exists a unique polynomial  symmetric and of degree
symmetric and of degree  ,
,  , of
, of 
 .
. ,
,  , and with
, and with  . There exists an elliptic curve ε defined over
. There exists an elliptic curve ε defined over  with a unique
with a unique  such that
such that  and
and  . The curve ε is called the
. The curve ε is called the 
 ,
,  .
. or equivalently the trace
or equivalently the trace  .
.
 (and hence of
(and hence of  ) are infinite sequences and hence cannot be represented in computer memory. However, we make an approximate representation by considering only the first
) are infinite sequences and hence cannot be represented in computer memory. However, we make an approximate representation by considering only the first  . Working in
. Working in  with this approximate representation is then essentially the same as working in
with this approximate representation is then essentially the same as working in  . For the Satoh–FGH algorithm, we need
. For the Satoh–FGH algorithm, we need  , the Satoh–FGH algorithm has a deterministic running time O(
, the Satoh–FGH algorithm has a deterministic running time O( must have a suitably large prime divisor, say, of bit length 160 or more. In addition, the MOV attack applies to supersingular curves and the anomalous attack to anomalous curves (
must have a suitably large prime divisor, say, of bit length 160 or more. In addition, the MOV attack applies to supersingular curves and the anomalous attack to anomalous curves (
 . One may use either the SEA algorithm or the Satoh–FGH algorithm to compute
. One may use either the SEA algorithm or the Satoh–FGH algorithm to compute  . Once
. Once  is known, it is easy to check whether
is known, it is easy to check whether  to find its largest prime divisor may be a difficult task and is not recommended. One may instead extract all the small prime factors of
to find its largest prime divisor may be a difficult task and is not recommended. One may instead extract all the small prime factors of  by trial divisions with the primes
by trial divisions with the primes  where
where  takes up most of the execution time of the above algorithm. It is, therefore, of utmost importance to employ good algorithms for point counting. The best algorithms known till date (the SEA and the Satoh–FGH
takes up most of the execution time of the above algorithm. It is, therefore, of utmost importance to employ good algorithms for point counting. The best algorithms known till date (the SEA and the Satoh–FGH  .
. .
. .
. .
.


 of relatively small cardinality, one can choose a random curve
of relatively small cardinality, one can choose a random curve  and compute
and compute  . Since
. Since  and
and  can be easily obtained using
can be easily obtained using  . However, the drawback of this method is that since
. However, the drawback of this method is that since  , we do not have many choices. The second drawback is that we must have a small divisor
, we do not have many choices. The second drawback is that we must have a small divisor  be a finite field and
be a finite field and 
 . Recall from
. Recall from  can be represented uniquely as a reduced divisor Div(
can be represented uniquely as a reduced divisor Div(
 requires O(
requires O( , computes the reduced divisor Div
, computes the reduced divisor Div which satisfies Div(
which satisfies Div(
 can be added in polynomial time. The correctness of the two algorithms is not difficult to establish, but the proof is long and involved and hence omitted. Interested readers might look at the appendix of Koblitz’s book [
can be added in polynomial time. The correctness of the two algorithms is not difficult to establish, but the proof is long and involved and hence omitted. Interested readers might look at the appendix of Koblitz’s book [ and
and  , one can easily write an algorithm (similar to
, one can easily write an algorithm (similar to  .
.
 rather than in the cardinality of the curve
rather than in the cardinality of the curve  . Algorithmic and implementational studies of counting
. Algorithmic and implementational studies of counting  have not received enough research endeavour till date and though polynomial-time algorithms are known to this effect (at least for curves of small genus), these algorithms are far from practical for hyperelliptic curves of cryptographic sizes. In this section, we look at some of these algorithms.
have not received enough research endeavour till date and though polynomial-time algorithms are known to this effect (at least for curves of small genus), these algorithms are far from practical for hyperelliptic curves of cryptographic sizes. In this section, we look at some of these algorithms. .
.  ,
,  -automorphism of
-automorphism of  . The map
. The map  naturally (that is, coordinate-wise) extends to the points on
naturally (that is, coordinate-wise) extends to the points on  and also to divisors and, in particular, to the Jacobian
and also to divisors and, in particular, to the Jacobian  as well as to
as well as to  . For a reduced divisor Div
. For a reduced divisor Div , we have
, we have  , where for a polynomial
, where for a polynomial  the polynomial
the polynomial 
 to the coefficients of
to the coefficients of  satisfies a monic polynomial χ(
satisfies a monic polynomial χ(
 is related to the polynomial χ(
is related to the polynomial χ(

 ,
,
 is the direct sum of at most 2
is the direct sum of at most 2 with
with  (See
(See  . Since
. Since  , that is,
, that is,  . There are examples with
. There are examples with  . On the other hand,
. On the other hand,  . So it is possible to have
. So it is possible to have  .
. .
. .
.
 , the algorithm never terminates. Thus, we may forcibly terminate the algorithm by reporting
, the algorithm never terminates. Thus, we may forcibly terminate the algorithm by reporting  . Instead of computing ν directly, we compute an (integral) multiple μ of ν, factorize μ and then determine ν. Since
. Instead of computing ν directly, we compute an (integral) multiple μ of ν, factorize μ and then determine ν. Since  which is exponential in the input size. This method, therefore, cannot be used except when
which is exponential in the input size. This method, therefore, cannot be used except when  , we have
, we have  and |
and | be the set of
be the set of  . The Frobenius map restricted to
. The Frobenius map restricted to  satisfies
satisfies
 of the form
of the form  of the polynomial ring
of the polynomial ring  such that a reduced divisor
such that a reduced divisor  if and only if
if and only if  . Thus the computation of the left side of Equation (
. Thus the computation of the left side of Equation ( . An explicit set of generators for
. An explicit set of generators for  can be found in Kampkötter [
can be found in Kampkötter [ ) in the 4-variate polynomial ring
) in the 4-variate polynomial ring  is, indeed, expensive. Use of
is, indeed, expensive. Use of  .
. .
. is generated by a single element. In particular,
is generated by a single element. In particular,  . Deduce that in this case there exists
. Deduce that in this case there exists  such that ord
such that ord  (or
(or  ) or the set
) or the set  (or
(or  ) or the set
) or the set  of
of  -rational points on an elliptic (or hyperelliptic) curve. By
-rational points on an elliptic (or hyperelliptic) curve. By  is equally likely to get selected, that is, if #
is equally likely to get selected, that is, if # .
. .
. .
. has four distinct square roots modulo
has four distinct square roots modulo  is a quadratic residue modulo
is a quadratic residue modulo  . We discuss the basic operations in this ring. Next we talk about algorithms for
. We discuss the basic operations in this ring. Next we talk about algorithms for  . If
. If  is the same as the arithmetic of
is the same as the arithmetic of  modulo the
modulo the  is cryptographically safe, we require
is cryptographically safe, we require  , that check if a given element is a
, that check if a given element is a 
 . We end the study of finite fields by discussing a way to
. We end the study of finite fields by discussing a way to  of degree
of degree 
 . This computation took nearly 82 hours on a 731 MHz Alpha EV6 processor. With these new developments, the point counting problem is practically solved for fields of small characteristics. However, for prime fields the known algorithms require further enhancements in order to be useful on a wide scale.
. This computation took nearly 82 hours on a 731 MHz Alpha EV6 processor. With these new developments, the point counting problem is practically solved for fields of small characteristics. However, for prime fields the known algorithms require further enhancements in order to be useful on a wide scale. is a unique factorization domain (UFD) (
is a unique factorization domain (UFD) ( (unique up to rearrangement) such that
(unique up to rearrangement) such that  for some
for some 
 with
with  , determine all the prime divisors of
, determine all the prime divisors of  , find a non-trivial divisor
, find a non-trivial divisor  is the prime factorization of
is the prime factorization of  . Thus, if the prime factorization of
. Thus, if the prime factorization of  , compute φ(
, compute φ( is also a UFD. Quite interestingly, it is computationally
is also a UFD. Quite interestingly, it is computationally  (that is, 0 < deg
(that is, 0 < deg  can be computed in probabilistic polynomial time, if
can be computed in probabilistic polynomial time, if  and an integer
and an integer  can be written as
can be written as  , compute ind
, compute ind is anyway cyclic. If
is anyway cyclic. If  , then the discrete logarithm or index of
, then the discrete logarithm or index of  if and only if
if and only if  , determine if a belongs to the subgroup of
, determine if a belongs to the subgroup of  and
and  of a finite field
of a finite field 
 of points of an elliptic curve defined over a finite field
of points of an elliptic curve defined over a finite field 
 of a hyperelliptic curve
of a hyperelliptic curve 
 , we may indeed replace, at least theoretically,
, we may indeed replace, at least theoretically,  , computing discrete logarithms in
, computing discrete logarithms in  ,
,  and
and  and one may introduce the specific names DHP, ECDHP and HECDHP to designate this problem applied to these specific groups.
and one may introduce the specific names DHP, ECDHP and HECDHP to designate this problem applied to these specific groups. . Given
. Given  , find out if there exist
, find out if there exist  , such that
, such that 
 . The integers
. The integers  . Consider the set of integer linear combinations of these vectors:
. Consider the set of integer linear combinations of these vectors:
 whose length ‖
whose length ‖ , find a vector
, find a vector  such that the length ‖
such that the length ‖ .
. . Show that the exponentiation map
. Show that the exponentiation map  ,
,  is not square-free, then for
is not square-free, then for  , is bijective.
, is bijective.  with gcd(
with gcd( such that
such that  , compute
, compute  such that
such that  . If, on the other hand,
. If, on the other hand, 
 we have ind
we have ind ,
,  the index ind
the index ind . Show that the computation of an isomorphism
. Show that the computation of an isomorphism  is polynomial-time equivalent to computing discrete logarithms in
is polynomial-time equivalent to computing discrete logarithms in  or
or  for every
for every  and
and 
 can be computed in polynomial time, then such a black box can be realized.)
can be computed in polynomial time, then such a black box can be realized.)
 is a quadratic residue modulo
is a quadratic residue modulo  . More generally, let
. More generally, let  and
and  . (This exercise shows that the DLP has a polynomial-time solution for Fermat primes
. (This exercise shows that the DLP has a polynomial-time solution for Fermat primes  ) will often be referred to as
) will often be referred to as  ,
,  .
. , that can be found by
, that can be found by  . This demands
. This demands  trial divisions and is clearly impractical, even when
trial divisions and is clearly impractical, even when  . So it suffices to carry out trial divisions by primes only. Though this modified strategy saves us many unnecessary divisions, the asymptotic complexity does not reduce much, since by the prime number theorem the number of primes ≤
. So it suffices to carry out trial divisions by primes only. Though this modified strategy saves us many unnecessary divisions, the asymptotic complexity does not reduce much, since by the prime number theorem the number of primes ≤  is about
is about  . In addition, we need to have a list of primes ≤
. In addition, we need to have a list of primes ≤  or generate the primes on the fly, neither of which is really practical. A trade-off can be made by noting that an integer
or generate the primes on the fly, neither of which is really practical. A trade-off can be made by noting that an integer  be an (unknown) prime divisor of
be an (unknown) prime divisor of 
 and generate a sequence
and generate a sequence 
 . Let
. Let  iterates
iterates  and compute only gcd(
and compute only gcd( , is ultimately periodic with expected length of period
, is ultimately periodic with expected length of period  , we eventually reach a
, we eventually reach a  , may be visualized as being located on the Greek letter ρ as shown in
, may be visualized as being located on the Greek letter ρ as shown in 
 . Since
. Since  , Pollard’s rho method runs in expected time
, Pollard’s rho method runs in expected time  .
. .
.
 . We will not describe these modifications in this book.
. We will not describe these modifications in this book. . An integer
. An integer  . Assume that
. Assume that  , this algorithm runs in a worst-case time of
, this algorithm runs in a worst-case time of  . However, if
. However, if 
 ,
,  generated by
generated by  random integers
random integers  . By the birthday paradox (
. By the birthday paradox ( , a bound
, a bound  .
. whose multiplicative order is
whose multiplicative order is  , whose multiplicative order is
, whose multiplicative order is  of order
of order  is irreducible and
is irreducible and  . Let
. Let  be the two roots of
be the two roots of  , we have
, we have 
 as polynomials
as polynomials  . Multiplying two such elements of
. Multiplying two such elements of  is accomplished by multiplying the two polynomials representing these elements modulo the defining polynomial
is accomplished by multiplying the two polynomials representing these elements modulo the defining polynomial 
 in order to compute
in order to compute  ,
,  to find elements of order
to find elements of order  ). The basic idea is to reach at a congruence of the form
). The basic idea is to reach at a congruence of the form
 and
and  and hence for a small integer
and hence for a small integer  . We try to factor
. We try to factor 
 . (Note that
. (Note that  and
and 
 such that the product
such that the product

 in
in  ) can be done using bit operations only.
) can be done using bit operations only. be a small prime (that is,
be a small prime (that is,  indexed by
indexed by  for each
for each  mod
mod  (mod
(mod  modulo
modulo  . We then lift the solutions
. We then lift the solutions  to the (unique) solutions
to the (unique) solutions  of the congruence
of the congruence  (mod
(mod  modulo
modulo  . We then again lift to obtain the solutions modulo
. We then again lift to obtain the solutions modulo 
 for which neither
for which neither  corresponds to any value of
corresponds to any value of  is 0. These are precisely the values of
is 0. These are precisely the values of  ). This is intuitively the reason why sieving speeds up the relation collection stage. For a more rigorous analysis of the running time, note that in order to get the desired
). This is intuitively the reason why sieving speeds up the relation collection stage. For a more rigorous analysis of the running time, note that in order to get the desired  modulo
modulo 
 , that is,
, that is,  for all
for all  . The size of
. The size of  is 2
is 2 . Therefore, ν is of the order of
. Therefore, ν is of the order of  , where
, where  , and where
, and where  , denote the harmonic numbers (
, denote the harmonic numbers ( as the criterion for selecting smooth values of
as the criterion for selecting smooth values of  for smooth
for smooth  or as
or as  ln
ln  . If some
. If some  for every power of 2 dividing
for every power of 2 dividing 
 at the end of the subtraction steps is < 2 ln
at the end of the subtraction steps is < 2 ln  . Instead of throwing away an apparently unusable Equation (
. Instead of throwing away an apparently unusable Equation ( . This situation can be detected by a compositeness test on the non-smooth part of
. This situation can be detected by a compositeness test on the non-smooth part of  , in practice the factor of
, in practice the factor of 
 , that is, in this case a relation looks like
, that is, in this case a relation looks like
 need to be checked for
need to be checked for 

 is very much similar to that for
is very much similar to that for  and then choose
and then choose  such that
such that  and
and  . (Indeed one may choose 0 <
. (Indeed one may choose 0 <  becomes
becomes 
 , this maximum value is smaller by a factor of
, this maximum value is smaller by a factor of  than the maximum value of |
than the maximum value of | (compared to M) by working with
(compared to M) by working with  corresponding to different choices for the prime
corresponding to different choices for the prime  indexed by
indexed by  to 0. For each prime
to 0. For each prime  (where the sum extends over all processors
(where the sum extends over all processors 
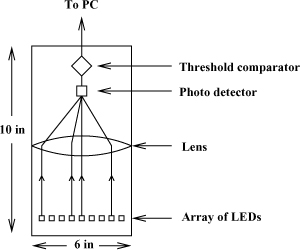
 of
of  . In that case, each LED emits light at regularly spaced clock cycles and this simplifies the electronic circuitry (at the cost of having twice the number of LEDs).
. In that case, each LED emits light at regularly spaced clock cycles and this simplifies the electronic circuitry (at the cost of having twice the number of LEDs). (to log |
(to log | , where
, where  , this running time is
, this running time is 
 of rational points on
of rational points on  allows us to identify the
allows us to identify the  -rational points on
-rational points on  . We now define a bound
. We now define a bound  and let
and let  . Of course,
. Of course,  satisfies
satisfies  , that is, ν = O(
, that is, ν = O( . This assumption is certainly not rigorous, but accepting it gives us a way to analyse the running time of the algorithm.
. This assumption is certainly not rigorous, but accepting it gives us a way to analyse the running time of the algorithm. random curves are tried, then we expect to find one
random curves are tried, then we expect to find one  , where
, where  we have
we have  . Computation of
. Computation of  , that is,
, that is,  (with no small prime factors).
(with no small prime factors). in
in  .
. , but
, but  , where
, where  . One finally gets
. One finally gets  , so that
, so that  small primes. The most expensive part of a trial with a random elliptic curve is the (attempted) computation of the point
small primes. The most expensive part of a trial with a random elliptic curve is the (attempted) computation of the point  additions of points. Since an expected number of
additions of points. Since an expected number of  elliptic curves needs to be tried for finding a non-trivial factor of
elliptic curves needs to be tried for finding a non-trivial factor of  additions of points on curves modulo
additions of points on curves modulo  is the optimal running time of the ECM and can be shown to be achieved by taking
is the optimal running time of the ECM and can be shown to be achieved by taking  . But, in practice,
. But, in practice,  . For example, for factoring integers of the form
. For example, for factoring integers of the form  and a polynomial
and a polynomial  such that
such that  ; otherwise a non-trivial factor of
; otherwise a non-trivial factor of  . Let
. Let  for some root
for some root  of
of  .
. is monogenic.
is monogenic. is a PID.
is a PID.
 be a predetermined
be a predetermined 
 being the set of all rational primes ≤
being the set of all rational primes ≤  is a product of prime ideals of prime norms ≤
is a product of prime ideals of prime norms ≤ 
 is the set of all prime ideals of
is the set of all prime ideals of  of prime norms ≤
of prime norms ≤  is a principal ideal. Let
is a principal ideal. Let 
 . Further let
. Further let  denote a set of generators of the multiplicative group of units of
denote a set of generators of the multiplicative group of units of 

 relations are available, Gaussian elimination modulo 2 (as in the case of the QSM) is expected to give us a congruence of the form
relations are available, Gaussian elimination modulo 2 (as in the case of the QSM) is expected to give us a congruence of the form . We require
. We require  and a non-zero integer
and a non-zero integer  and sets
and sets  is monogenic and a PID.
is monogenic and a PID.
 . From
. From 
 ,
,  ,
, 
 for some
for some  . Thus, each root of
. Thus, each root of  in
in  corresponds to a prime ideal of
corresponds to a prime ideal of  of prime norm
of prime norm  of prime norm is specified by a pair (
of prime norm is specified by a pair ( ). We denote this ideal by
). We denote this ideal by  . All ideals in
. All ideals in  can be precomputed by finding the roots of the defining polynomial
can be precomputed by finding the roots of the defining polynomial 
 of generators of ideals in
of generators of ideals in  is a costly operation. We have just seen that each prime ideal
is a costly operation. We have just seen that each prime ideal  of
of  corresponds to a pair (
corresponds to a pair ( of such an ideal
of such an ideal  is an element of the form
is an element of the form  ,
,  , with N(
, with N( (mod
(mod  of norm
of norm  is already a generator
is already a generator  , else some additional adjustments need to be performed.
, else some additional adjustments need to be performed. ,
,  ,
,  , N(
, N( \ {0}, |
\ {0}, | .
.  .
.

 .
.
 of units of
of units of 
 has norm
has norm  ,
,  are available as a by-product during the construction of
are available as a by-product during the construction of  , which involves the computation of norms of many elements in
, which involves the computation of norms of many elements in  . For a more general exposition on this topic, see
. For a more general exposition on this topic, see  ,
,  , is the group identity only for
, is the group identity only for  is the prime factorization of 〈
is the prime factorization of 〈 of
of  , by the multiplicative property of norms we obtain
, by the multiplicative property of norms we obtain  .
. of norm
of norm  for some
for some  . The assumption
. The assumption  implies that the inertial degree of
implies that the inertial degree of  is 1: that is,
is 1: that is,  , that is,
, that is,  , that is, there is a
, that is, there is a  corresponds to
corresponds to  of norm
of norm  corresponds to the pair
corresponds to the pair  , then
, then  . Since
. Since  are distinct modulo
are distinct modulo  of norm
of norm  in the factorization of 〈
in the factorization of 〈 and its multiplicity in the factorization of 〈
and its multiplicity in the factorization of 〈 , we eventually compute a factorization
, we eventually compute a factorization  , where
, where  . What remains is to factor
. What remains is to factor  . We don’t discuss this step here, but refer the reader to Lenstra et al. [
. We don’t discuss this step here, but refer the reader to Lenstra et al. [ indexed by
indexed by  . We may set
. We may set  for those values of
for those values of  , we compute
, we compute  for each
for each  is not (close to) 0, that is, for which
is not (close to) 0, that is, for which  . For the other values of
. For the other values of  . One may use incomplete sieving (with a liberal selection criterion) during the first sieve.
. One may use incomplete sieving (with a liberal selection criterion) during the first sieve. available from the first sieve. For each prime ideal
available from the first sieve. For each prime ideal  , we compute
, we compute  for which
for which  ln
ln  and
and  . If the attempt is successful, both
. If the attempt is successful, both  and
and  have the same asymptotic bound as
have the same asymptotic bound as  meets this bound. We then have
meets this bound. We then have  , define the
, define the  . Show that for each
. Show that for each  we have ln(
we have ln( , is not convergent. (Note, however, that the sequence
, is not convergent. (Note, however, that the sequence  , converges to the constant γ = 0.57721566 . . . known as the
, converges to the constant γ = 0.57721566 . . . known as the  .
. . We say that it is
. We say that it is  ,
,  be an odd integer and let
be an odd integer and let  , whereas
, whereas  and that the maximum of the same integers is |
and that the maximum of the same integers is | . Choose a factor base comprising all primes
. Choose a factor base comprising all primes  . Since ξ < 1/2, the CSM is more efficient than the QSM. For ξ ≈ 1/3, the running time is
. Since ξ < 1/2, the CSM is more efficient than the QSM. For ξ ≈ 1/3, the running time is  .
.

 . The new family of algorithms based on the
. The new family of algorithms based on the  with respect to a
with respect to a  . We concentrate only on the fields
. We concentrate only on the fields  ,
,  ,
,  , since non-prime fields of odd characteristics are only rarely used in cryptography.
, since non-prime fields of odd characteristics are only rarely used in cryptography.
 is the relation ≤ on
is the relation ≤ on  . Note that
. Note that  . Then
. Then  , the BSGS method runs in time
, the BSGS method runs in time 
 . Thus this method becomes impractical, even when
. Thus this method becomes impractical, even when  be a random map and let us generate a sequence of tuples
be a random map and let us generate a sequence of tuples  ,
,  , starting with a random (
, starting with a random ( for
for  of the elements
of the elements  , the same as that of the BSGS method, but the storage requirement drops to only O(1) elements of
, the same as that of the BSGS method, but the storage requirement drops to only O(1) elements of  .
. is known. Since
is known. Since  ,
,  . Let
. Let  , be the
, be the  , from the knowledge of
, from the knowledge of 

 and
and  for all
for all  ,
,  by the CRT can be done in polynomial time (in log
by the CRT can be done in polynomial time (in log  which is fully exponential in the input size log
which is fully exponential in the input size log  they achieve subexponential running times of the order of
they achieve subexponential running times of the order of 
 .
. of
of  can be expressed
can be expressed 

 is to be computed. If the values
is to be computed. If the values  . This is the reason why the first stage of the ICM is often called the
. This is the reason why the first stage of the ICM is often called the  be a finite field of prime cardinality. For cryptographic applications,
be a finite field of prime cardinality. For cryptographic applications,  are canonically represented as integers between (and including) 0 and
are canonically represented as integers between (and including) 0 and  means equality of two integers in the range 0, . . . ,
means equality of two integers in the range 0, . . . ,  are the same.
are the same. and compute
and compute  as an integer in {1, . . . ,
as an integer in {1, . . . , 
 , we compute
, we compute  .
. (
( random values of α are tried. Since for each α we need to carry out
random values of α are tried. Since for each α we need to carry out  . Now, in order to solve for
. Now, in order to solve for  . It can be easily checked that
. It can be easily checked that  is minimized for ζ = 1/2. This gives a running time of
is minimized for ζ = 1/2. This gives a running time of  . Thus the total running time of the basic ICM is
. Thus the total running time of the basic ICM is  . Once
. Once  . As a result, we expect to have a higher density of smooth integers among the candidates tested in the LSM than those in the basic method. Furthermore, the LSM employs sieving techniques instead of trial divisions. All these help LSM achieve a running time of
. As a result, we expect to have a higher density of smooth integers among the candidates tested in the LSM than those in the basic method. Furthermore, the LSM employs sieving techniques instead of trial divisions. All these help LSM achieve a running time of  and
and  . Let’s consider the congruence
. Let’s consider the congruence
 . If the integer
. If the integer  , then we have a relation
, then we have a relation
 in absolute value, has a probability of
in absolute value, has a probability of  and initializes to ln |
and initializes to ln | indexed by
indexed by  .
. for all
for all  for all
for all  .
. is equal (that is, sufficiently close) to 0. These are precisely the values of
is equal (that is, sufficiently close) to 0. These are precisely the values of  , where
, where  . The indices ind
. The indices ind
 is a direct adaptation of the NFSM used to factor integers (
is a direct adaptation of the NFSM used to factor integers ( and are interested in computing the index
and are interested in computing the index  .
. with small integer coefficients and of degree
with small integer coefficients and of degree  for some root
for some root  of
of  is a PID, and
is a PID, and  . We also choose an integer
. We also choose an integer 
 and let
and let  be the set of (rational) primes
be the set of (rational) primes  ,
,  the set of prime ideals of
the set of prime ideals of  of prime norms
of prime norms  ,
,  a set of generators of the (principal) ideals
a set of generators of the (principal) ideals  and
and  a set of generators of the group of units of
a set of generators of the group of units of  .
. and
and  respectively, that is, we have factorizations of the forms
respectively, that is, we have factorizations of the forms  and
and  or equivalently,
or equivalently,  . But then
. But then  , that is,
, that is,

 so that we have the
so that we have the  -smooth, that is,
-smooth, that is,
 the ideal
the ideal  can be written as a product of prime ideals of
can be written as a product of prime ideals of  , that is,
, that is,

 such that 〈γ〉 is
such that 〈γ〉 is  -smooth. We instead write
-smooth. We instead write 
 . In order to see how one can find a representation of a as a product of small integers as in Congruence (
. In order to see how one can find a representation of a as a product of small integers as in Congruence ( ,
,  . We work with the representation
. We work with the representation  for some irreducible polynomial
for some irreducible polynomial  with deg
with deg  (
( ) and extend the definition of smoothness in the obvious way: that is, a polynomial is called smooth if it factors into irreducible polynomials of low degrees. The next theorem is an analog of
) and extend the definition of smoothness in the obvious way: that is, a polynomial is called smooth if it factors into irreducible polynomials of low degrees. The next theorem is an analog of  ,
,  , deg
, deg  of degree
of degree  with
with  are represented as polynomials of degrees ≤
are represented as polynomials of degrees ≤  that a randomly chosen element of
that a randomly chosen element of  has all irreducible factors of degrees ≤
has all irreducible factors of degrees ≤  , as
, as  by ψ(
by ψ( for some positive α and β, so that
for some positive α and β, so that  and, consequently,
and, consequently,

 having degrees ≤
having degrees ≤  . (As in the case of the basic ICM for prime fields, this can be shown to be the optimal choice.) By Approximation (
. (As in the case of the basic ICM for prime fields, this can be shown to be the optimal choice.) By Approximation ( .
. of being smooth. Note that unlike integers a polynomial over
of being smooth. Note that unlike integers a polynomial over 
 can be done in (probabilistic) polynomial time, and each relation is available in expected time
can be done in (probabilistic) polynomial time, and each relation is available in expected time  . Since we need (slightly more than)
. Since we need (slightly more than)  relations for setting up the linear system, the relation collection stage runs in expected time
relations for setting up the linear system, the relation collection stage runs in expected time  . A sparse system with
. A sparse system with  unknowns can also be solved in time
unknowns can also be solved in time  .
. . Therefore, the second stage is again faster than the first and the basic method takes a total expected running time of
. Therefore, the second stage is again faster than the first and the basic method takes a total expected running time of 
 requires time
requires time  : that is, a non-zero polynomial in
: that is, a non-zero polynomial in  of degree <
of degree <  (as in the case of
(as in the case of  behaviour of the basic method, but it leads to considerable speed-up in practice.
behaviour of the basic method, but it leads to considerable speed-up in practice. ,
,  ) of degree
) of degree  . For polynomials
. For polynomials  of small degrees, we then have
of small degrees, we then have and let the factor base
and let the factor base  , we then check the smoothness of
, we then check the smoothness of  of characteristic 2. Theoretically it achieves the (heuristic) running time
of characteristic 2. Theoretically it achieves the (heuristic) running time  using Coppersmith’s algorithm in tandem with a polynomial sieving procedure and, thereby, established the practicality of the algorithm.
using Coppersmith’s algorithm in tandem with a polynomial sieving procedure and, thereby, established the practicality of the algorithm. is of the form
is of the form  ) of degrees ≤
) of degrees ≤  ) of degrees ≤
) of degrees ≤  and γ = α–1/2 gives the optimal running time of the first stage as
and γ = α–1/2 gives the optimal running time of the first stage as , where
, where 
 such that
such that  , and let
, and let 

 indexed by
indexed by  must contain 2
must contain 2 the location
the location  , where
, where  with coefficients 0 and 1. We initialize all the locations of
with coefficients 0 and 1. We initialize all the locations of  to zero.
to zero. be the solution of this congruence with
be the solution of this congruence with  . If δ* >
. If δ* >  . So we may also assume that δ ≤
. So we may also assume that δ ≤  for all polynomials
for all polynomials  .
. , we find out for which values of
, we find out for which values of  contain values close to deg(
contain values close to deg( as
as  . While doing so serves our purpose, it is not very efficient, because computing each
. While doing so serves our purpose, it is not very efficient, because computing each  . Then the (
. Then the ( of
of  and
and  , whereas for
, whereas for 
 and let
and let  be the gray code of dimension
be the gray code of dimension  and
and  differ in exactly one bit position
differ in exactly one bit position  for the (
for the ( . Now,
. Now,  is available at the beginning. By
is available at the beginning. By  .
. . However, for much larger fields, say for
. However, for much larger fields, say for  , determines using only O(lg
, determines using only O(lg  can be represented uniquely as a polynomial of degree <
can be represented uniquely as a polynomial of degree <  is a ring under point-wise addition and multiplication. Prove the ring isomorphism
is a ring under point-wise addition and multiplication. Prove the ring isomorphism  .
. . For a
. For a  , prove the explicit formula
, prove the explicit formula  (mod
(mod  ?
?
 , we try to factor random powers
, we try to factor random powers  .
. the average
the average  and the maximum
and the maximum 
 , |
, | . Show that
. Show that  . Define for
. Define for  the integers
the integers  and
and  . Choose a small
. Choose a small  and repeat the linear sieve method for each
and repeat the linear sieve method for each  be the average of |
be the average of | , where
, where  is as defined in
is as defined in  for both the choices: (1)
for both the choices: (1)  and (2)
and (2)  Let the integers
Let the integers  together with the integers
together with the integers  . If
. If  . Therefore, if ξ < 1/2, the CSM is asymptotically faster than the LSM method, since the LSM runs in time
. Therefore, if ξ < 1/2, the CSM is asymptotically faster than the LSM method, since the LSM runs in time  of the CSM.
of the CSM.
 is (
is ( and
and  , deduce that the expected number of solutions of Congruence (
, deduce that the expected number of solutions of Congruence ( ,
,  Let
Let  be represented as
be represented as  , where the defining polynomial
, where the defining polynomial  of small degrees (
of small degrees ( based on this observation. What is the best running time of this method?
based on this observation. What is the best running time of this method?  to the DLP over the field
to the DLP over the field  for some suitable
for some suitable  . Since, the DLP can be solved in subexponential time, the ECDLP is also solved in that time, provided that the extension degree
. Since, the DLP can be solved in subexponential time, the ECDLP is also solved in that time, provided that the extension degree  is small. For supersingular curves, one can choose
is small. For supersingular curves, one can choose  and let
and let  be of order
be of order  . Unless it is necessary, we will not assume any specific defining equation for
. Unless it is necessary, we will not assume any specific defining equation for  of
of  is the algebraic closure of
is the algebraic closure of  ,
,  and
and  . In particular,
. In particular,  in this case.
in this case. for all
for all  or
or  for all
for all  .
. with gcd(
with gcd( (and
(and  is the group of
is the group of  to the DLP in a suitable field
to the DLP in a suitable field  . Let
. Let  . The definition of
. The definition of  belongs to
belongs to  (that is, is the divisor of a rational function on
(that is, is the divisor of a rational function on  and
and  . Since
. Since  , there is a rational function
, there is a rational function  such that
such that  . Now,
. Now,  as well and
as well and  and, therefore, there exists a rational function
and, therefore, there exists a rational function  with
with  . The functions
. The functions  . One can show that we can choose
. One can show that we can choose  is the multiplication map
is the multiplication map  and
and  we have
we have  is infinite), we can choose
is infinite), we can choose  and define
and define and
and  Then we have:
Then we have: )
) , then
, then  .
. of order
of order 
 .
. .
.

 is obvious from the definition of
is obvious from the definition of  for which α =
for which α =  be of order
be of order  the cosets
the cosets  is generated by two elements of order
is generated by two elements of order  . Then
. Then  ,
,  , we have
, we have  , that is,
, that is,  .
. be of order
be of order 

 . It can also be shown that if
. It can also be shown that if  , then
, then  that is,
that is,  for all
for all  . The computation of the discrete logarithm indα β is then carried out in
. The computation of the discrete logarithm indα β is then carried out in  . For
. For  for
for  . First note that if
. First note that if  is a divisor and if
is a divisor and if  is a rational function on
is a rational function on 
 (where
(where  ) and consider the divisors
) and consider the divisors  ) is infinite, one can choose both
) is infinite, one can choose both  , it follows that
, it follows that 
 , where
, where  . Since deg
. Since deg  , we can write
, we can write  . Suppose that we have an Algorithm A that, for a pair of reduced divisors
. Suppose that we have an Algorithm A that, for a pair of reduced divisors


 . Let 1 =
. Let 1 =  , then we have
, then we have  . So assume
. So assume  and
and  . Let
. Let  . By
. By  . Let
. Let  . But then
. But then  , that is, we take
, that is, we take  , then
, then  and, therefore,
and, therefore,  . Thus, in this case too, we take
. Thus, in this case too, we take  and
and  and
and  , then both
, then both  . Since
. Since  , the rational function
, the rational function  .
.  be a finite field of odd prime cardinality
be a finite field of odd prime cardinality  . We assume that
. We assume that  . Since
. Since  is cyclic and, in particular, isomorphic to the additive group (
is cyclic and, in particular, isomorphic to the additive group ( , +). This isomorphism is effectively exploited by the SmartASS method to give a polynomial time algorithm for computing ECDLP in the group
, +). This isomorphism is effectively exploited by the SmartASS method to give a polynomial time algorithm for computing ECDLP in the group  .
.
 we have
we have  by setting
by setting 
 of
of  . We have
. We have  , then 0 =
, then 0 =  ,
,  and we have 0 =
and we have 0 =  . We conclude that
. We conclude that  is a unit if and only if
is a unit if and only if  which is easily seen to be an ideal of
which is easily seen to be an ideal of  .
. and define
and define  . Clearly, each
. Clearly, each  is an ideal of
is an ideal of  of
of  . If
. If  contains a unit, that is,
contains a unit, that is,  . So assume
. So assume  . Conversely, let
. Conversely, let  , so that
, so that  with
with  ; that is,
; that is,  . Thus,
. Thus,  . In other words,
. In other words,  ,
,  , are the only non-zero ideals of
, are the only non-zero ideals of  .
. is surjective. Let
is surjective. Let  be such that
be such that  and hence equals
and hence equals  . One can likewise show that
. One can likewise show that  for all
for all  . Thus
. Thus  of
of  of fractions of
of fractions of  is called the
is called the  of which
of which  is the valuation ring. Let the
is the valuation ring. Let the 
 . However, a
. However, a  , one may add the base-
, one may add the base- in the usual manner till the desired level of precision. A
in the usual manner till the desired level of precision. A  ) if and only if
) if and only if  also has a
also has a  .
. can be written uniquely as γ =
can be written uniquely as γ =  and γ0 ≠ 0. We then set
and γ0 ≠ 0. We then set  of which
of which  is the valuation ring. Moreover, since γ0 + γ1
is the valuation ring. Moreover, since γ0 + γ1 ,
, 
 . Here we consider the case that
. Here we consider the case that  as well and denote this curve by ε. The coordinate-wise application of the canonical surjection
as well and denote this curve by ε. The coordinate-wise application of the canonical surjection  induces the
induces the  . Now, we define the following subgroups of
. Now, we define the following subgroups of  :
:
 is a subgroup of
is a subgroup of  and
and  is a subgroup of
is a subgroup of  . Furthermore, since
. Furthermore, since 
 and
and  generated by
generated by  ,
,  be such that
be such that  and
and  . It is not difficult to find such points
. It is not difficult to find such points  and
and  . For example, if
. For example, if  , where
, where  , the point
, the point  and, therefore,
and, therefore,  . Now, if we take the so-called
. Now, if we take the so-called  (mod
(mod 
 is invertible modulo
is invertible modulo 
 . For further details on the algorithm (like the computation of
. For further details on the algorithm (like the computation of  and
and  from
from  only.
only. to a curve ε over
to a curve ε over  . In view of this, we start with a couple of important results regarding elliptic curves over
. In view of this, we start with a couple of important results regarding elliptic curves over  (or, more generally, over a number field). See Silverman [
(or, more generally, over a number field). See Silverman [ for some
for some  .
. ,
, 
 such that
such that  . Let
. Let  .
. , compute an elliptic curve ε defined over
, compute an elliptic curve ε defined over  and points
and points  such that modulo
such that modulo 

 . But in that case the desired index ind
. But in that case the desired index ind , then we have (
, then we have ( (that we are going to construct) has a small rank. We choose a product
(that we are going to construct) has a small rank. We choose a product  and points
and points  . The first four points should be
. The first four points should be  such that
such that  (mod
(mod  (mod
(mod 
 is a lift of
is a lift of  , treated as a curve over
, treated as a curve over  , need not pass through the points
, need not pass through the points  of
of 
 (mod
(mod  evidently continues to be a lift of
evidently continues to be a lift of  to the standard Weierstrass equation
to the standard Weierstrass equation .
. with
with  . This corresponds to the relation
. This corresponds to the relation  , where
, where  and
and  . Elements of
. Elements of  , ·).
, ·). is a subgroup of
is a subgroup of  .
. is a primitive
is a primitive  , then evidently
, then evidently  such that
such that 
 .
.  , where
, where  .
. ,
, 
 is a torsion element of
is a torsion element of  is not finite.
is not finite.  being the field over which the curve is defined), the ADH algorithm (and its improvements) run in time
being the field over which the curve is defined), the ADH algorithm (and its improvements) run in time  ).
). . We assume that the cardinality of the Jacobian
. We assume that the cardinality of the Jacobian 
 of order
of order  with respect to α.
with respect to α. can be written uniquely as
can be written uniquely as  ,
,  satisfying deg
satisfying deg  is called
is called  is irreducible (that is, prime) over
is irreducible (that is, prime) over  .
. , let
, let  . There exist polynomials
. There exist polynomials  such that
such that  , where
, where  , then
, then  .
. with deg
with deg  be an (irreducible) polynomial of degree 1. In order to find out
be an (irreducible) polynomial of degree 1. In order to find out  such that Div(
such that Div( . Furthermore,
. Furthermore,  , if existent, can be found by solving a quadratic equation over
, if existent, can be found by solving a quadratic equation over  . There are
. There are  of degree 1 and for each such
of degree 1 and for each such  . Assuming that both these possibilities are equally likely, we conclude that the size of the factor base is ≈
. Assuming that both these possibilities are equally likely, we conclude that the size of the factor base is ≈  over the factor base
over the factor base 
 . Let us write
. Let us write  . Then for some
. Then for some  we have
we have  , where
, where  is smooth.
is smooth.
 is smooth is approximately 1/
is smooth is approximately 1/ of medium sizes. For example, Koblitz [
of medium sizes. For example, Koblitz [ . An interesting consequence of the last proposition is that the proportion of smooth divisors in
. An interesting consequence of the last proposition is that the proportion of smooth divisors in  depends only on the genus
depends only on the genus  . In the first stage, we choose a random
. In the first stage, we choose a random  and compute the (reduced) divisor
and compute the (reduced) divisor  is approximately
is approximately  . This fact is consistent with the representation of reduced divisors by pairs of polynomials. Gaudry [
. This fact is consistent with the representation of reduced divisors by pairs of polynomials. Gaudry [ runs in (expected) time O~(
runs in (expected) time O~( . If we want to take
. If we want to take  . The factor base consists of a subexponential (in lg
. The factor base consists of a subexponential (in lg  which is not necessarily a field. Most of the methods we describe below assume that
which is not necessarily a field. Most of the methods we describe below assume that  is a field, that is,
is a field, that is,  , α
, α for
for  . Finally, all these lifted solutions are combined using the CRT to get the solution modulo
. Finally, all these lifted solutions are combined using the CRT to get the solution modulo  . We proceed by induction on α. Let us denote the (or
. We proceed by induction on α. Let us denote the (or  . Now, assume that for some
. Now, assume that for some 


 . Substituting this in Congruence (
. Substituting this in Congruence ( .
. is a field). In a field, every non-zero element is invertible. But if
is a field). In a field, every non-zero element is invertible. But if  which are not invertible (that is, for which gcd(
which are not invertible (that is, for which gcd( for an
for an  . The minimum is attained, when the gradient ∇
. The minimum is attained, when the gradient ∇ .
. . First, the matrix
. First, the matrix  is that the question of minimizing an
is that the question of minimizing an  -valued function makes hardly any sense (and so does positive definiteness of a matrix over
-valued function makes hardly any sense (and so does positive definiteness of a matrix over  ). However, the conjugate gradient method is essentially based on the generation of a set of mutually orthogonal vectors
). However, the conjugate gradient method is essentially based on the generation of a set of mutually orthogonal vectors  . Similarly, we may have a non-zero error vector
. Similarly, we may have a non-zero error vector  , for which 〈
, for which 〈 (more precisely, the computations of
(more precisely, the computations of  and work in this extension. The eventual solution we will reach at will be in
and work in this extension. The eventual solution we will reach at will be in  , but working in the larger field decreases the possibility of an attempt of division by 0.
, but working in the larger field decreases the possibility of an attempt of division by 0. in place of
in place of  , namely every calculation we perform in
, namely every calculation we perform in  is
is  ,
,  ,
,  .
. .
. .
. is equivalent to the condition
is equivalent to the condition  are essentially the same as those discussed in connection with the conjugate gradient method. The problem with a non-symmetric and/or non-square matrix
are essentially the same as those discussed in connection with the conjugate gradient method. The problem with a non-symmetric and/or non-square matrix  is that of encountering a non-zero direction vector
is that of encountering a non-zero direction vector  . If it happens, we have to abort the computation prematurely. In order to restart the procedure, we try to solve the system
. If it happens, we have to abort the computation prematurely. In order to restart the procedure, we try to solve the system  or of some suitable extension
or of some suitable extension  (if
(if  uses ideas different from those employed by the other methods discussed so far. For the sake of simplicity, we assume that
uses ideas different from those employed by the other methods discussed so far. For the sake of simplicity, we assume that  ,
,  , let
, let  .
. for every
for every  . Therefore, for each
. Therefore, for each 
 can be computed using O~(
can be computed using O~( .
. be a knapsack set. For
be a knapsack set. For  , we are required to find out
, we are required to find out  such that
such that  , provided that a solution exists. In general, finding such a solution for ∊1, . . . , ∊
, provided that a solution exists. In general, finding such a solution for ∊1, . . . , ∊ is defined to be the real number
is defined to be the real number  .
. for all
for all  .
. of
of  , if it exists, failure, otherwise.
, if it exists, failure, otherwise. ,
,  be
be  -linear combinations of
-linear combinations of 
 . The
. The 
 , we are supposed to find out
, we are supposed to find out  such that
such that  . Let
. Let  generated by the vectors
generated by the vectors
 . The vector
. The vector  is in the lattice
is in the lattice  . Involved calculations (carried out in Coster et al. [
. Involved calculations (carried out in Coster et al. [ with ‖
with ‖ , where
, where  specified by a basis of
specified by a basis of  of
of  such that
such that  (that is,
(that is,  and
and 
 need not be a basis for
need not be a basis for 
 of
of  .
. ,
,  .
. constitute an orthogonal basis of
constitute an orthogonal basis of  . Using these notations, we introduce the following important concept:
. Using these notations, we introduce the following important concept:

 . For any
. For any 
 of
of  for
for 
 , then
, then  .
.
 . This factoring algorithm indeed runs in time polynomially bounded by the degree of the polynomial to be factored and is one of the major breakthroughs in the history of symbolic computing.
. This factoring algorithm indeed runs in time polynomially bounded by the degree of the polynomial to be factored and is one of the major breakthroughs in the history of symbolic computing. be a knapsack set. Show that:
be a knapsack set. Show that:
 .
. , then there exist two different tuples (∊1, . . . , ∊
, then there exist two different tuples (∊1, . . . , ∊ in {0, 1}
in {0, 1} .
. and let
and let  be the Gram–Schmidt orthogonalization of the basis
be the Gram–Schmidt orthogonalization of the basis  .
. is, however, efficient if
is, however, efficient if  to DLP in the finite field
to DLP in the finite field  for some suitable
for some suitable  . This
. This  to a curve over
to a curve over  . Experimental and theoretical evidences suggest that the XCM is not an efficient solution to the ECDLP.
. Experimental and theoretical evidences suggest that the XCM is not an efficient solution to the ECDLP. . The best algorithm for these fields is Coppersmith’s algorithm [
. The best algorithm for these fields is Coppersmith’s algorithm [
 .
. to computing discrete logs in the field
to computing discrete logs in the field  for some
for some  . Again, the algorithm demands curves of high genus. An implementation of the Adleman–DeMarrais–Huang algorithm is given by Gaudry [
. Again, the algorithm demands curves of high genus. An implementation of the Adleman–DeMarrais–Huang algorithm is given by Gaudry [ there exists
there exists  such that
such that  .
. .
. .
. .
. .
. .
. .
. .
. is a square modulo both
is a square modulo both  .
. .
. or (
or ( {
{  implies that
implies that  , even when
, even when  , we continue to have
, we continue to have 
 . If the factorization of
. If the factorization of  , where
, where  (resp.
(resp.  ) and computing the Legendre symbol
) and computing the Legendre symbol  (resp.
(resp.  ). Under the assumption that quadratic non-residues are randomly located in
). Under the assumption that quadratic non-residues are randomly located in  and
and  ,
,  .
. . It generates a tuple (
. It generates a tuple ( such that each
such that each  . If
. If  .
. , which is a bit string of length
, which is a bit string of length  .
. .
. .
. are with high probability coprime to
are with high probability coprime to  \{0} and skip the check whether gcd(
\{0} and skip the check whether gcd( .
. .
.
 , where
, where  .
. .
. .
. and is quite fast (for example, faster than RSA encryption with a general encryption exponent). It makes sense to assume that the initial choice of
and is quite fast (for example, faster than RSA encryption with a general encryption exponent). It makes sense to assume that the initial choice of  , since finding a non-zero non-invertible element of
, since finding a non-zero non-invertible element of  is as difficult as factoring
is as difficult as factoring  (where
(where  .
. , before an attempt is made to compute the square root of
, before an attempt is made to compute the square root of  .
.
 of a finite field
of a finite field  (usually
(usually  with a suitably large (preferably prime) order
with a suitably large (preferably prime) order  , the ElGamal encryption procedure (
, the ElGamal encryption procedure ( .
. (where
(where  (where
(where  .
. ,
,  , with
, with  . In order to construct the set
. In order to construct the set  . We represent
. We represent  as
as  , where
, where  is irreducible of degree
is irreducible of degree  . The parameters
. The parameters  can be made available quickly using
can be made available quickly using  . We can then take
. We can then take  are two binary vectors of weight
are two binary vectors of weight  implies
implies  , that is,
, that is,  , that is,
, that is,  for all
for all 
 ,
,  .
.
 can be encoded into binary vectors of the above special form. See Chor and Rivest [
can be encoded into binary vectors of the above special form. See Chor and Rivest [ .
. (mod
(mod  of degree
of degree  (mod
(mod  (mod
(mod  . The roots of
. The roots of  .
. .
.
 (mod
(mod 
 using known algorithms is infeasible. We have
using known algorithms is infeasible. We have  with #
with # is called the
is called the 
 , that is, one gets the same level of security by the use of
, that is, one gets the same level of security by the use of  . This is precisely where the intermediate field
. This is precisely where the intermediate field  comes into picture. We require a map
comes into picture. We require a map  , so that we can represent elements of
, so that we can represent elements of  . This map offers two benefits. First, the elements of
. This map offers two benefits. First, the elements of  can be exploited to implement the arithmetic in
can be exploited to implement the arithmetic in  uses the traces of elements of
uses the traces of elements of  over
over  (
( . The conjugates of an element
. The conjugates of an element  over
over  are
are 
 . Since
. Since 
 is
is
 by
by  . Note, however, that this representation is not unique, that is, the map
. Note, however, that this representation is not unique, that is, the map  , is not injective. More precisely, the only elements of
, is not injective. More precisely, the only elements of  defined above is
defined above is  . Since
. Since  . If
. If  is a root of
is a root of  . That is, we can represent
. That is, we can represent  . Since 1 + α + α2 = 0, we have
. Since 1 + α + α2 = 0, we have 
 -basis {α, α2} of
-basis {α, α2} of  is the same as the normal basis {α, α
is the same as the normal basis {α, α can be implemented using only a few multiplications (and some additions/subtractions) in
can be implemented using only a few multiplications (and some additions/subtractions) in 

 multiplications
multiplications under the representation of
under the representation of  by
by  . To start with, we show how the knowledge of Tr(
. To start with, we show how the knowledge of Tr( . This corresponds to an exponentiation in
. This corresponds to an exponentiation in  , define the polynomial
, define the polynomial
 are the three roots (not necessarily distinct) of
are the three roots (not necessarily distinct) of  , we use the notation
, we use the notation

 (for example, Tr(
(for example, Tr( (typically
(typically  ). The correctness of the algorithm is based on the following identities, the derivations of which are left to the reader (alternatively, see Lenstra and Verheul [
). The correctness of the algorithm is based on the following identities, the derivations of which are left to the reader (alternatively, see Lenstra and Verheul [







 and
and  .
. .
.

 . An exponentiation in
. An exponentiation in  , on the other hand, requires an expected
, on the other hand, requires an expected  (assuming that, in
(assuming that, in  , the time for squaring is 80 per cent of that of multiplication). Thus, the XTR representation provides a speed-up of about 3.
, the time for squaring is 80 per cent of that of multiplication). Thus, the XTR representation provides a speed-up of about 3. , the element
, the element  .
.

 is irreducible (over
is irreducible (over  ) for some
) for some  , then
, then  with ord
with ord  can be taken to be any root of the polynomial
can be taken to be any root of the polynomial  . A randomized algorithm results from the fact that for a randomly chosen
. A randomized algorithm results from the fact that for a randomly chosen  the polynomial
the polynomial  and computes Tr(
and computes Tr( under the trace representation of the elements of
under the trace representation of the elements of  to be encrypted.
to be encrypted. .
. .
. .
. .
. arithmetic.
arithmetic. and reductions modulo two relatively prime integers α and β. The decryption involves an unmixing system and can be proved to be correct with high probability. The security of this scheme banks on the interaction of the mixing system with the independence of the reductions modulo α and β. Attacks against NTRU based on the determination of short vectors in certain lattices are known. However, suitable choices of the parameters make NTRU resistant to these attacks. The most attractive feature of the NTRU scheme is that encryption and decryption in this case are much faster than those in other known schemes (like RSA, ECC and even XTR).
and reductions modulo two relatively prime integers α and β. The decryption involves an unmixing system and can be proved to be correct with high probability. The security of this scheme banks on the interaction of the mixing system with the independence of the reductions modulo α and β. Attacks against NTRU based on the determination of short vectors in certain lattices are known. However, suitable choices of the parameters make NTRU resistant to these attacks. The most attractive feature of the NTRU scheme is that encryption and decryption in this case are much faster than those in other known schemes (like RSA, ECC and even XTR). . An element of
. An element of  is represented as a polynomial
is represented as a polynomial  (for
(for  , whereas
, whereas 
 consists of all polynomials of
consists of all polynomials of  so far, we use the integers between –α/2 and +α/2 to represent the coefficients of polynomials in
so far, we use the integers between –α/2 and +α/2 to represent the coefficients of polynomials in  , that is,
, that is,
 , we also define the subset
, we also define the subset

 ,
,  ,
,  and
and  are assumed to be public knowledge (along with the parameters
are assumed to be public knowledge (along with the parameters  ,
,  as defined above.
as defined above.

 , where
, where  . Since
. Since  is a field, that is,
is a field, that is,  is a Euclidean domain (
is a Euclidean domain ( , else we get
, else we get  and
and  . A randomly chosen
. A randomly chosen  , so that
, so that  , we have
, we have  . Substituting this value in
. Substituting this value in 
 for some
for some  . In this case,
. In this case,  . The costliest step in this algorithm is computing the product
. The costliest step in this algorithm is computing the product  .
. .
. has coefficients in the interval –β/2 and +β/2. In that case, we have the equality
has coefficients in the interval –β/2 and +β/2. In that case, we have the equality  .
. and some care should be taken to choose suitable values of
and some care should be taken to choose suitable values of  exhaustively, until
exhaustively, until  . Alternatively, one may try all
. Alternatively, one may try all  , until
, until  . In a similar manner,
. In a similar manner,  , until
, until  . Clearly, such an attack takes expected time proportional to the size of
. Clearly, such an attack takes expected time proportional to the size of 
 or
or  .
. ,
,  and
and  big enough, so that exhaustive or square root attacks are not feasible. Typically, choosing the sizes of these sets to be ≥ 2160 is deemed sufficiently secure.
big enough, so that exhaustive or square root attacks are not feasible. Typically, choosing the sizes of these sets to be ≥ 2160 is deemed sufficiently secure. generated by the rows of the 2
generated by the rows of the 2
 . How many solutions does the polynomial
. How many solutions does the polynomial  ?
?  be a quadratic residue modulo
be a quadratic residue modulo  .
.
 .
. . Show that the least significant bit of
. Show that the least significant bit of  , returns the second least significant bit of ind
, returns the second least significant bit of ind ,
,  having suitably large (and preferably prime) multiplicative order
having suitably large (and preferably prime) multiplicative order  to be shared by Alice and Bob.
to be shared by Alice and Bob.







 .
. .
.
 . Bob, on the other hand, can normally compute
. Bob, on the other hand, can normally compute  (or some part of it) and sends the ciphertext to Bob. In order to decrypt, Bob tries all of the
(or some part of it) and sends the ciphertext to Bob. In order to decrypt, Bob tries all of the  is chosen to be an element (like
is chosen to be an element (like  is in
is in 
 to be shared by Alice and Bob.
to be shared by Alice and Bob.


 .
.
 , where the domain parameters
, where the domain parameters  . Let
. Let  , let
, let  denote the integer
denote the integer  . The bit size of
. The bit size of  is about half of that of
is about half of that of  (mod
(mod  .
. and
and  . Here the exponents σ
. Here the exponents σ , since she knows the static public key
, since she knows the static public key  from a knowledge of the public keys
from a knowledge of the public keys  to be shared by Alice and Bob.
to be shared by Alice and Bob. (mod
(mod  .
. (mod
(mod  .
. and
and  , of which the first and the last ones have exponents O(
, of which the first and the last ones have exponents O( is
is  , so that the middle exponentiation is about twice as fast as a full exponentiation. This performance benefit justifies the use of
, so that the middle exponentiation is about twice as fast as a full exponentiation. This performance benefit justifies the use of  and
and  instead of
instead of  (mod
(mod  .
. of order
of order  .
.
 .
.
 (mod
(mod  {
{ 

 .
.
 (mod
(mod  {
{  . We further assume that the elements of
. We further assume that the elements of  .
. . This verification calls for three exponentiations in
. This verification calls for three exponentiations in 
 .
. {
{  of order
of order  . We also assume the existence of a (publicly known) function
. We also assume the existence of a (publicly known) function  .
. (mod
(mod  {
{  , where
, where  is required to have a prime divisor
is required to have a prime divisor  , which we describe in
, which we describe in  of multiplicative order
of multiplicative order  .
. and hence are represented as integers between 0 and
and hence are represented as integers between 0 and 
 .
.


 {
{  and takes a random elliptic curve
and takes a random elliptic curve  .
.  has a suitably large prime divisor
has a suitably large prime divisor  of order
of order  generated by
generated by  , where
, where 
 .
. .
. )
)
 ).
). can be computed using the SEA algorithm (for
can be computed using the SEA algorithm (for  ). The condition
). The condition  is not necessarily a cyclic group. But,
is not necessarily a cyclic group. But,  must be one of order
must be one of order  .
.  with integers in the set {0, 1, . . . ,
with integers in the set {0, 1, . . . , 




 (mod
(mod  {
{  and has a prime order
and has a prime order  taking
taking  is used to represent an element
is used to represent an element  by the element
by the element  . Under this representation, arithmetic in
. Under this representation, arithmetic in  . For example, we have seen how exponentiation in
. For example, we have seen how exponentiation in  arithmetic (
arithmetic ( (the private key) and the trace
(the private key) and the trace  (the public key).
(the public key).  . So we assume that the public key consists of the three traces
. So we assume that the public key consists of the three traces  . As explained in Lenstra and Verheul [
. As explained in Lenstra and Verheul [ ). For
). For  , let
, let 
 , that is, the matrix
, that is, the matrix 
 .
. .
. .
.

 {
{  .
. (mod
(mod  {
{  and consider the ring
and consider the ring  . Elements of
. Elements of  followed by setting
followed by setting  and
and  of
of  one defines
one defines  , and where
, and where  is assumed to consist of
is assumed to consist of  .
. . The average of the coefficients of
. The average of the coefficients of  . The
. The 
 , one also defines
, one also defines and any polynomial
and any polynomial  have (centred) norms on the order O(
have (centred) norms on the order O( and
and  . The polynomial
. The polynomial  with the property that
with the property that  from polynomials
from polynomials  , where
, where  .
.
 can be identified as a vector (
can be identified as a vector ( define a vector, denoted by (
define a vector, denoted by (
 , then (
, then ( , then
, then  for any polynomial
for any polynomial  . In particular, since
. In particular, since  , it follows that
, it follows that  . Of these two polynomials only
. Of these two polynomials only  is close to the message vector
is close to the message vector 
 .
. and sends
and sends  to Bob. Bob generates the signature (
to Bob. Bob generates the signature ( , σ) on
, σ) on  and sends this pair back to Alice. Finally, Alice applies a second transform
and sends this pair back to Alice. Finally, Alice applies a second transform  of Bob on
of Bob on 
 .
.
 .
.

 .
. and gains no idea about
and gains no idea about  be of order
be of order 
 .
.

 .
.
 .
.
 .
.
 .
. . Since
. Since  are secret knowledges of Bob, Alice must depend on Bob for the computation of
are secret knowledges of Bob, Alice must depend on Bob for the computation of  . The message
. The message  of (large prime) order
of (large prime) order  . We assume that there is a hash function
. We assume that there is a hash function  . We identify elements of
. We identify elements of 
 .
.

 .
.
 .
.

 .
.


 .
. . Each invocation of the protocol uses a session private key
. Each invocation of the protocol uses a session private key  . Alice must depend on Bob for generating
. Alice must depend on Bob for generating  and
and  . Alice, in an attempt to forge Bob’s blind signature, may start with random
. Alice, in an attempt to forge Bob’s blind signature, may start with random  and
and  of her choice. But she still needs the integers
of her choice. But she still needs the integers  ,
,  of multiplicative order
of multiplicative order  and computes
and computes  . In order to generate a CvA signature on a message
. In order to generate a CvA signature on a message  .
. .
. (mod
(mod  .
.
 ,
,  . Choosing a (fixed) small value of
. Choosing a (fixed) small value of 
 has multiplicative order 1 or 2 (there are four such values of α). In view of this, we define the subset
has multiplicative order 1 or 2 (there are four such values of α). In view of this, we define the subset
 . Any element
. Any element 
 of order ≤ 2 and can choose to output (
of order ≤ 2 and can choose to output ( , even in the case that the forger has unbounded computational resources.
, even in the case that the forger has unbounded computational resources. .
.
 .
.

 . On the other hand,
. On the other hand,  , one has
, one has  . Thus, Bob can only guess the secret value of
. Thus, Bob can only guess the secret value of  .
Verify if
.
Verify if  ) as
) as  using an unkeyed hash function
using an unkeyed hash function  is used instead of
is used instead of  .
. .
. 

 ) on
) on 
 ) on a message
) on a message 

 . Show that
. Show that  .
.  of order ≤ 2.
of order ≤ 2. contain?
contain? have order
have order  for every
for every  .
. . Show that
. Show that  with ord
with ord (namely,
(namely, 

 .
.
 .
. and
and  . Using only
. Using only  .
.


 .
. and
and  .
.

 .
. and
and  .
. .
. .
.

 .
. .
. .
. (mod
(mod  , and the probability that this is correct is overwhelmingly low. On the other hand, let Carol choose a random
, and the probability that this is correct is overwhelmingly low. On the other hand, let Carol choose a random 
 . In that case, Carol can answer the valid response
. In that case, Carol can answer the valid response  to the challenge ∊1 = 0 now requires knowledge of
to the challenge ∊1 = 0 now requires knowledge of 

 .
. .
. . We assume that a suitably large prime divisor
. We assume that a suitably large prime divisor  of multiplicative order
of multiplicative order  , generated by
, generated by 

 .
. .
. .
. is a quadratic residue modulo
is a quadratic residue modulo 
 . Attacks on NTRU based on the shortest vector problem are also known.
. Attacks on NTRU based on the shortest vector problem are also known.

 of points in an elliptic curve over a finite field. Messages that need to be encrypted or signed are, on the other hand, usually human-readable text or numbers or keys of secret-key cryptographic protocols, which are typically represented in computers in the form of sequences of bits (or bytes). It is necessary to convert such bit stings (or byte strings) to mathematical elements before the cryptographic algorithms are applied. This conversion is referred to as
of points in an elliptic curve over a finite field. Messages that need to be encrypted or signed are, on the other hand, usually human-readable text or numbers or keys of secret-key cryptographic protocols, which are typically represented in computers in the form of sequences of bits (or bytes). It is necessary to convert such bit stings (or byte strings) to mathematical elements before the cryptographic algorithms are applied. This conversion is referred to as  are represented as integers 0, 1, . . . ,
are represented as integers 0, 1, . . . ,  with the congruence class [
with the congruence class [ . Arithmetic operations in
. Arithmetic operations in  are the corresponding integer operations modulo the prime
are the corresponding integer operations modulo the prime  are represented as bit strings of length
are represented as bit strings of length  is an
is an  -vector space. Let β0, . . . , β
-vector space. Let β0, . . . , β over
over 
 . Selection of the basis β0, . . . , β
. Selection of the basis β0, . . . , β of degree
of degree  as
as  . Letting
. Letting  one chooses the ordered basis β0 =
one chooses the ordered basis β0 =  under this representation are those of
under this representation are those of  followed by reduction modulo the defining polynomial
followed by reduction modulo the defining polynomial  which is normal over
which is normal over  (see
(see  is carried out as explained in
is carried out as explained in  , provided that
, provided that  over
over  . An element of
. An element of  is of the form
is of the form 
 is represented. One can use a polynomial- or normal-basis representation of
is represented. One can use a polynomial- or normal-basis representation of  (over
(over  ), or even a composite-basis representation of
), or even a composite-basis representation of  over
over  , if
, if  ,
,  is represented as
is represented as  ,
,  is an irreducible polynomial of degree
is an irreducible polynomial of degree  is then of the form α =
is then of the form α =  , that is, an integer in the range 0, 1, . . . ,
, that is, an integer in the range 0, 1, . . . ,  (see the packed representation of
(see the packed representation of  , one has to expand the integer in base
, one has to expand the integer in base  is specified by two elements
is specified by two elements  . Depending on the characteristic of
. Depending on the characteristic of  this pair defines the following curves.
this pair defines the following curves. , 3, then 4
, 3, then 4 and the equation of the elliptic curve is taken to be
and the equation of the elliptic curve is taken to be 
 and we use the non-supersingular curve
and we use the non-supersingular curve  has characteristic 3, then both
has characteristic 3, then both  and the elliptic curve
and the elliptic curve  on an elliptic curve defined over
on an elliptic curve defined over  can be represented either in
can be represented either in  . The compressed form can be either
. The compressed form can be either  . There are two solutions (perhaps repeated) for
. There are two solutions (perhaps repeated) for  specifies which of these two values is represented. Depending on how the bit
specifies which of these two values is represented. Depending on how the bit  is computed, we have two different lossless compressed forms.
is computed, we have two different lossless compressed forms. or fields
or fields  of even characteristic. For
of even characteristic. For  , the bit
, the bit 
 , we have
, we have  , if
, if  is the least significant bit of the element
is the least significant bit of the element  One converts
One converts  and
and  using the FE2I primitive and sets
using the FE2I primitive and sets  .
. with
with  computed by one of the methods (LSB or SORT) described above.
computed by one of the methods (LSB or SORT) described above. . We denote
. We denote  as usual. An element of
as usual. An element of  , and is represented by the ordered
, and is represented by the ordered 
 are known to be from {0, 1}, it is convenient to represent
are known to be from {0, 1}, it is convenient to represent 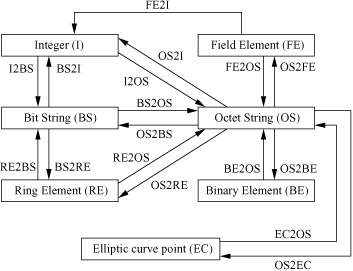
 .
. and can be naturally identified with an octet. I2OS returns the octet string
and can be naturally identified with an octet. I2OS returns the octet string  , where
, where  to an octet string. Depending on the value of
to an octet string. Depending on the value of  is odd, β is represented as an integer in {0, 1, . . . ,
is odd, β is represented as an integer in {0, 1, . . . ,  . Again we have two possibilities depending on
. Again we have two possibilities depending on  is of odd characteristic, the primitive OS2I is called to convert the given octet string to an integer. This integer is returned as the field element.
is of odd characteristic, the primitive OS2I is called to convert the given octet string to an integer. This integer is returned as the field element. and the integer equivalent of β be sought for. If
and the integer equivalent of β be sought for. If  at infinity (on an elliptic curve over
at infinity (on an elliptic curve over  ) is defined by an octet string comprising a single zero octet only. So let
) is defined by an octet string comprising a single zero octet only. So let  , where
, where =
=  if compression is used, it is 0 otherwise.
if compression is used, it is 0 otherwise.




 is output. Otherwise, the elliptic curve point
is output. Otherwise, the elliptic curve point 
 . If the hybrid scheme is used and
. If the hybrid scheme is used and  , OS2EC halts after reporting error. If all computations are successful till now, the point (
, OS2EC halts after reporting error. If all computations are successful till now, the point ( are optional and may be omitted. For the lossy compression scheme, the
are optional and may be omitted. For the lossy compression scheme, the  and can be identified as polynomials with integer coefficients and of degrees <
and can be identified as polynomials with integer coefficients and of degrees <  (where
(where  ) is represented by the
) is represented by the  . Once again a modulus β ≤ 256 is assumed, so that each octet
. Once again a modulus β ≤ 256 is assumed, so that each octet  is output. Thus, for example, the octet string 02 0b 00 65 7f 47 00 gets converted to the ring element 2 + 11
is output. Thus, for example, the octet string 02 0b 00 65 7f 47 00 gets converted to the ring element 2 + 11 be given, where each
be given, where each  . One applies the I2BS primitive on each
. One applies the I2BS primitive on each  , and repeatedly call the BS2I primitive on the bit strings
, and repeatedly call the BS2I primitive on the bit strings  .
. with each
with each  . One can convert
. One can convert  . First let
. First let 
 is to be determined. As in the case with BE2OS, we index the bits in the octet
is to be determined. As in the case with BE2OS, we index the bits in the octet  . On the other hand, if
. On the other hand, if  equals the polynomial
equals the polynomial  is returned.
is returned. (mod
(mod  , but is expected to be of sufficiently large multiplicative order modulo
, but is expected to be of sufficiently large multiplicative order modulo  .
. (mod
(mod  ,
,  and
and 
 of Step (9) for each of the four choices of
of Step (9) for each of the four choices of 
 only for the correct guess
only for the correct guess 

 and so
and so

 is zero, or
is zero, or
 are non-zero. (Recall that Var(α
are non-zero. (Recall that Var(α for the four choices of
for the four choices of  one gets
one gets

 with the correctness of the current guess. Once Carol notices this, she backtracks and changes older guesses until the expected behaviour is restored. Thus, the timing attack comes with an error detection and correction strategy.
with the correctness of the current guess. Once Carol notices this, she backtracks and changes older guesses until the expected behaviour is restored. Thus, the timing attack comes with an error detection and correction strategy.
 ,
,  and the private key
and the private key  (mod
(mod  (mod
(mod  and
and  and subsequently the differential power trace
and subsequently the differential power trace
 and so the power consumption at some time τ is correlated to the bit
and so the power consumption at some time τ is correlated to the bit  . At any other instant, the power consumption is uncorrelated to this particular bit value. Therefore, if the sample size is sufficiently large and if the measurement noise has mean at zero, we have:
. At any other instant, the power consumption is uncorrelated to this particular bit value. Therefore, if the sample size is sufficiently large and if the measurement noise has mean at zero, we have:
 never appears in the execution of the algorithm and so at every time
never appears in the execution of the algorithm and so at every time  and so we expect
and so we expect
 . If the noise has a variance of
. If the noise has a variance of 

 , say,
, say,  , that is,
, that is,  behaves randomly in relation to the same bit of (
behaves randomly in relation to the same bit of ( . The corresponding faulty signature is denoted by
. The corresponding faulty signature is denoted by  . We assume that the CRT combination of
. We assume that the CRT combination of  and
and  and the correct signature
and the correct signature  (mod
(mod  (mod
(mod  (mod
(mod  . On the other hand,
. On the other hand,  (mod
(mod  . Therefore,
. Therefore,
 alone reveals the secret divisor
alone reveals the secret divisor  (mod
(mod  (mod
(mod  (mod
(mod 
 modulo
modulo  . The position
. The position 

 , . . . ,
, . . . ,  modulo
modulo  with these 2
with these 2 of multiplicative order
of multiplicative order  . The routine generates the faulty signature
. The routine generates the faulty signature  , where
, where

 and so
and so
 and a similar calculation shows that
and a similar calculation shows that
 and
and  for all
for all  (though the
(though the  . The signer’s key-pair is (
. The signer’s key-pair is ( , is first chosen (by Alice or by a trusted third party). Alice selects random
, is first chosen (by Alice or by a trusted third party). Alice selects random  and random bits δ1, . . . , δ
and random bits δ1, . . . , δ (mod
(mod  and sends to Bob the witness
and sends to Bob the witness  ,
,  as usual. Upon reception of this challenge Alice computes and sends to Bob the faulty response
as usual. Upon reception of this challenge Alice computes and sends to Bob the faulty response
 now aids Bob to obtain the product
now aids Bob to obtain the product  as follows. First, note that
as follows. First, note that

 .
. satisfies the last congruence. In practice, the existence of two (or more) solutions for (
satisfies the last congruence. In practice, the existence of two (or more) solutions for (

 satisfying
satisfying


 .
. .
. 
 . This permutation facilitates investigating several choices for
. This permutation facilitates investigating several choices for  (for some small bound
(for some small bound 

 .
.

 and 2
and 2 and
and  .
.
 .
. .
. , and (
, and (
 , we have
, we have

 , a party (Alice) generates random session key pairs of the form (
, a party (Alice) generates random session key pairs of the form ( to generate
to generate  .
. .
.  (mod
(mod  the multiplicative order ord
the multiplicative order ord be such that
be such that  .
. . Take
. Take  and let ord
and let ord with the property that
with the property that  (or
(or  ). Using
). Using  satisfying the following properties:
satisfying the following properties: , the inner product 〈ψ|ψ〉 is real and non-negative. Moreover, 〈ψ|ψ〉 = 0 if and only if |ψ〉 = 0.
, the inner product 〈ψ|ψ〉 is real and non-negative. Moreover, 〈ψ|ψ〉 = 0 if and only if |ψ〉 = 0. and |ψ〉,
and |ψ〉,  , we have
, we have  .
. , we have
, we have  , where the bar denotes complex conjugate.
, where the bar denotes complex conjugate. , the space
, the space  is an inner product space with the inner product of |ψ〉 = (ψ1, . . . , ψ
is an inner product space with the inner product of |ψ〉 = (ψ1, . . . , ψ defined as
defined as

 which is complete (
which is complete ( ) and for
) and for  denote the
denote the  .
. as
as  if and only if
if and only if  for some
for some  . An equivalence class under this relation is called a
. An equivalence class under this relation is called a  . One typically considers a vector |ψ〉 with 〈ψ|ψ〉 = 1 as a representative of its equivalence class. Such a representative is unique up to multiplication by complex numbers of the form
. One typically considers a vector |ψ〉 with 〈ψ|ψ〉 = 1 as a representative of its equivalence class. Such a representative is unique up to multiplication by complex numbers of the form  is a subset
is a subset  with the following properties:
with the following properties: -basis of
-basis of  .
. .
. for every pair of distinct vectors ψ,
for every pair of distinct vectors ψ,  .
. by the symbols |0〉, |1〉, . . . , |
by the symbols |0〉, |1〉, . . . , | under the inner product of Example (
under the inner product of Example ( ).
). . Such a system is assumed to be the basic building block of a quantum computer and is called a
. Such a system is assumed to be the basic building block of a quantum computer and is called a  has an orthonormal basis {|0〉, |1〉}. In the classical interpretation, a cbit can assume only the two values |0〉 and |1〉, whereas a qubit can assume any value of the form
has an orthonormal basis {|0〉, |1〉}. In the classical interpretation, a cbit can assume only the two values |0〉 and |1〉, whereas a qubit can assume any value of the form , |
, | and
and  . Let {|
. Let {|
 is an
is an 
 components
components  is the Hilbert space of
is the Hilbert space of  with orthonormal basis {|0〉, |1〉}. So
with orthonormal basis {|0〉, |1〉}. So  with an orthonormal basis consisting of the vectors
with an orthonormal basis consisting of the vectors . Viewed as an integer in binary notation,
. Viewed as an integer in binary notation, 
 ) with complex entries. The conjugate transpose of
) with complex entries. The conjugate transpose of  .
.  , that is,
, that is,  for |ψ〉,
for |ψ〉,  .
. . An
. An  taking a normalized vector |ψ〉 to a normalized vector
taking a normalized vector |ψ〉 to a normalized vector  to another orthonormal basis of
to another orthonormal basis of  (
(
 and
and  , the Hadamard transform corresponds to the unitary matrix
, the Hadamard transform corresponds to the unitary matrix

 of
of  for
for  of
of  and
and  . By linearity, we have
. By linearity, we have  . Now, since
. Now, since  . The two expressions for
. The two expressions for  are different, unless
are different, unless  . A
. A  , and
, and  (|alive〉 – |dead〉) should not bother us at all!
(|alive〉 – |dead〉) should not bother us at all!
 . Also this measurement causes
. Also this measurement causes  .
.

 . We won’t measure
. We won’t measure 
 .
.

 , where δ
, where δ and
and  form an orthonormal
form an orthonormal  -basis of
-basis of  .
.
 is an entangled state of a 2-bit quantum register.
is an entangled state of a 2-bit quantum register.
 is unitary.
is unitary. , then
, then  .
. (over
(over  ).
). .
.
 . Show that
. Show that 
 , where the last
, where the last 



 . This is precisely the state of
. This is precisely the state of  .
. .
. .
. .
. or
or  to Bob. At this point Bob does not know whether Alice applied
to Bob. At this point Bob does not know whether Alice applied  and accordingly skips/applies the Hadamard transform on the qubit received. If
and accordingly skips/applies the Hadamard transform on the qubit received. If  in this case. A measurement of this bit outputs 0 or 1, each with probability
in this case. A measurement of this bit outputs 0 or 1, each with probability  , that is, Bob gathers no idea about the initial choice of Alice. So after it is established that
, that is, Bob gathers no idea about the initial choice of Alice. So after it is established that 











































 (
( ,
,  respectively. Alice and Bob use 0°- and 45°-filters. Alice makes a random choice (
respectively. Alice and Bob use 0°- and 45°-filters. Alice makes a random choice ( ,
,  depending on her choice of
depending on her choice of  . If
. If  .
. . Let
. Let  be a periodic function with (least) period
be a periodic function with (least) period  . Suppose further that 1 ≪
. Suppose further that 1 ≪  evaluations of
evaluations of 
 for some
for some  and the state of the register
and the state of the register 
 with the probability
with the probability
 of
of 
 for 0 ≤
for 0 ≤  to get
to get
 has about
has about  . If
. If  and with
and with  and
and  , then by the triangle inequality we have
, then by the triangle inequality we have  . On the other hand, since
. On the other hand, since  , a contradiction. Therefore, since
, a contradiction. Therefore, since  , there is a unique rational
, there is a unique rational  , and this rational
, and this rational  . We have φ(
. We have φ( the ciphertext message is
the ciphertext message is  . But then
. But then  also. Since
also. Since  generated by
generated by  generated by
generated by  with
with  sending
sending  . If gcd(
. If gcd( . Let
. Let  with
with  ,
,  one can factor
one can factor  ,
,  ,
,  . For the sake of simplicity, let us concentrate only on prime fields (
. For the sake of simplicity, let us concentrate only on prime fields ( and our task is to compute for a given
and our task is to compute for a given  an integer
an integer  with
with  with
with  , that is, A has the initial state:
, that is, A has the initial state:

 and causes the input register to jump to the state
and causes the input register to jump to the state

 with probability:
with probability:
 . But then
. But then  . Let
. Let  , –
, –
 is an integer, substituting Equation (
is an integer, substituting Equation (



 . Let us now see how many pairs (
. Let us now see how many pairs ( , since
, since  . Dividing throughout by
. Dividing throughout by 
 must lie between
must lie between  and
and  . The measurement of the input gives us
. The measurement of the input gives us  to the nearest multiple
to the nearest multiple  of
of  and get
and get 
 have binary expansions (
have binary expansions ( .
.
 ,
,  . Consider an (
. Consider an (
 . Then, apply
. Then, apply 
 to refer to the
to refer to the  stand for the set of all bit strings of length
stand for the set of all bit strings of length  , we will use the alternative notation
, we will use the alternative notation  .
.

 . In that case, the decryption of
. In that case, the decryption of  .
. . That is, it should be difficult to guess
. That is, it should be difficult to guess  , though a permutation of
, though a permutation of 
 . Thus, for example, taking
. Thus, for example, taking  . If
. If  to stand respectively for DES encryption and decryption functions under the key
to stand respectively for DES encryption and decryption functions under the key  .
. .
.
 .
. .
.
 .
. .
. .
. is an expansion function,
is an expansion function,  is a contraction function and P is a fixed permutation of
is a contraction function and P is a fixed permutation of  (called the permutation function).
(called the permutation function).  and
and  .
. .
.
 .
.
 one first computes the round keys
one first computes the round keys  and in the finite ring
and in the finite ring  .
. , whereas an entire 32-bit word is identified with an element of
, whereas an entire 32-bit word is identified with an element of  .
.
 , where
, where  is identified with the octet
is identified with the octet  .
. -algebra
-algebra  is not a field, since the polynomial
is not a field, since the polynomial  and so over
and so over  ). However, each element β of
). However, each element β of  . As described in the last paragraph, each α
. As described in the last paragraph, each α .
. and
and  by ⊙ and that of
by ⊙ and that of  and
and  is invertible; the inverse is denoted by α–1 and can be computed by the extended gcd algorithm on polynomials over
is invertible; the inverse is denoted by α–1 and can be computed by the extended gcd algorithm on polynomials over  . With an abuse of notation, we take 0–1
. With an abuse of notation, we take 0–1

 . The following table summarizes these values for
. The following table summarizes these values for 

 for all
for all 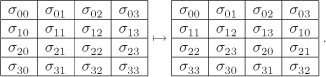

 , by the element
, by the element  , where
, where  . For the
. For the 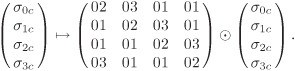
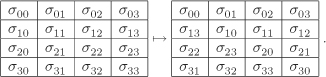
 , that is, by the element [0b]
, that is, by the element [0b]
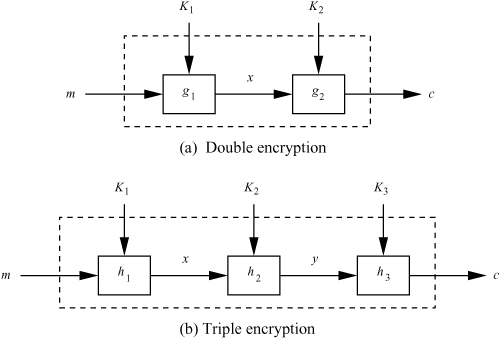
 the encrypted message
the encrypted message  the decrypted message
the decrypted message  . Now, (
. Now, ( .
. is assumed to be a random permutation of
is assumed to be a random permutation of  , for a given
, for a given  for an expected number of 2
for an expected number of 2 in O(
in O( . This mode of operation of a block cipher is called the
. This mode of operation of a block cipher is called the 

 . In this mode, the plaintext blocks are not encrypted, but masked by XOR-ing with a stream of random keys generated from a (not necessarily secret)
. In this mode, the plaintext blocks are not encrypted, but masked by XOR-ing with a stream of random keys generated from a (not necessarily secret)  .
. , let us denote these values by
, let us denote these values by  ,
,  ,
,  for
for  and
and  for all
for all  denote the bit-wise complement of
denote the bit-wise complement of  , that is, complementing both the plaintext message and the key complements the ciphertext message.
, that is, complementing both the plaintext message and the key complements the ciphertext message.  for all
for all  , where
, where  can be computed by a left shift followed conditionally (derive the condition) by XORing with the octet 1b.
can be computed by a left shift followed conditionally (derive the condition) by XORing with the octet 1b. using bit manipulations on octets only.
using bit manipulations on octets only. can be made table-driven. Since this field contains 256 elements, a 256 × 256 array suffices to store all the products. That requires a storage of 64 kb. We can considerably reduce the storage by using discrete logs.
can be made table-driven. Since this field contains 256 elements, a 256 × 256 array suffices to store all the products. That requires a storage of 64 kb. We can considerably reduce the storage by using discrete logs.
 ) is 51.
) is 51. .
. to the base
to the base  using table lookup.
using table lookup. by ⊗ (
by ⊗ (
 .
.
 .
. denote the 8 × 8 matrix of Part (a). Prove that
denote the 8 × 8 matrix of Part (a). Prove that  is invertible over
is invertible over  with
with
 in such a way that
in such a way that  .
.

 .
.  that yields
that yields  , μ ↦
, μ ↦  .
.  .
. . Suppose that the bits
. Suppose that the bits  the probability Pr(
the probability Pr(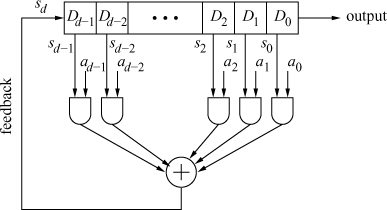
 the delay element
the delay element 


 ). Consider the extension
). Consider the extension  of
of  , represented as
, represented as  , where
, where  . It turns out that if
. It turns out that if  , then
, then  .
. in order to generate the key
in order to generate the key  . The
. The  , that is,
, that is,  (mod 2).
(mod 2).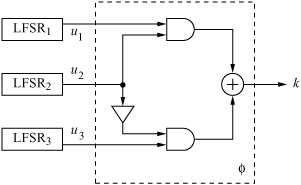
 or ψ) eliminates the chance of mounting the straightforward known-plaintext attack described above. However, for polynomial non-linearities certain algebraic attacks are known, for example, see Courtois and Pieprzyk [
or ψ) eliminates the chance of mounting the straightforward known-plaintext attack described above. However, for polynomial non-linearities certain algebraic attacks are known, for example, see Courtois and Pieprzyk [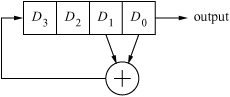
 ) is
) is  ,
,  , denote a power series
, denote a power series . Show that
. Show that  with each
with each  . The set of all such power series is denoted by
. The set of all such power series is denoted by  and
and  over
over  and the product
and the product  , where
, where  . Under these operations
. Under these operations  with
with  . A function
. A function 
 with
with  , then, without the length block, we would get
, then, without the length block, we would get  . Since
. Since  are different and thus
are different and thus  is a collision for
is a collision for  for some
for some  . Choose the largest such
. Choose the largest such  are defined and equal for this choice. This gives us the collision
are defined and equal for this choice. This gives us the collision  for
for  for all
for all  . Since
. Since  with
with  . For such an
. For such an  implies that
implies that  is a collision for
is a collision for  that sends
that sends  and
and  to the encrypted bit string
to the encrypted bit string  , the resulting compression function
, the resulting compression function  ,
,  stores the leftmost 32 bits of
stores the leftmost 32 bits of  the next 32 bits of
the next 32 bits of  the rightmost 32 bits of
the rightmost 32 bits of  ,
,  stores the leftmost 32 bits of
stores the leftmost 32 bits of  the rightmost 32 bits of
the rightmost 32 bits of  ) denotes bit-wise complementation and ⊕ denotes bit-wise XOR, each on 32-bit operands. The notation LR
) denotes bit-wise complementation and ⊕ denotes bit-wise XOR, each on 32-bit operands. The notation LR

 ,
, 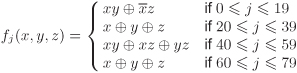
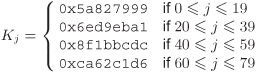

 . Here, 0
. Here, 0 is collision resistant (and hence second pre-image resistant), but not first pre-image resistant.
is collision resistant (and hence second pre-image resistant), but not first pre-image resistant.  be a
be a  as follows. Let
as follows. Let  as
as  such that 2
such that 2 and define
and define  and
and  be cryptographic compression functions. Show that
be cryptographic compression functions. Show that  defined as
defined as  and
and  ) is again a cryptographic compression function.
) is again a cryptographic compression function. and they replaced all
and they replaced all  of randomly generated keys and assigns to each sensor node
of randomly generated keys and assigns to each sensor node  of
of  . The set
. The set  is called the
is called the  and
and 
 is associated with an ID that need not be kept secret and can even be transmitted in plaintext. Similarly, each sensor node is given a unique ID which need not be maintained secretly.
is associated with an ID that need not be kept secret and can even be transmitted in plaintext. Similarly, each sensor node is given a unique ID which need not be maintained secretly.
 of randomly generated keys. The number
of randomly generated keys. The number  is taken to be a small multiple of the network size
is taken to be a small multiple of the network size  is selected and given to
is selected and given to 


 and
and  . (
. ( key rings of size
key rings of size  of size
of size  , the total number of ways of choosing
, the total number of ways of choosing  such that
such that  does
does 
 . It then follows that
. It then follows that
 and consequently the probability that
and consequently the probability that  . Thus, the probability of successful eavesdropping is
. Thus, the probability of successful eavesdropping is
 of
of  . Let the network consist of
. Let the network consist of  to the eavesdropper. Chan et al. [
to the eavesdropper. Chan et al. [ ways of choosing two random key rings of size
ways of choosing two random key rings of size  of such pairs of key rings sharing
of such pairs of key rings sharing  ways. Out of the remaining
ways. Out of the remaining  ways. Finally, the remaining
ways. Finally, the remaining  ways from
ways from 

 . Each of these common keys is available to the eavesdropper with a probability
. Each of these common keys is available to the eavesdropper with a probability  . It follows that
. It follows that
 are transfered securely along these paths. The nodes
are transfered securely along these paths. The nodes 
 . The bigger
. The bigger 

 called the
called the  . This is too small to be useful. We require modifications of the random pairwise scheme in order to be able to use it in practice.
. This is too small to be useful. We require modifications of the random pairwise scheme in order to be able to use it in practice.
 be a finite field with
be a finite field with  be a bivariate polynomial that is assumed to be symmetric, that is,
be a bivariate polynomial that is assumed to be symmetric, that is,  . Two shares
. Two shares 
 as a shared secret between them.
as a shared secret between them. of
of  each of degree
each of degree  are also generated for the nodes in the network. For each node
are also generated for the nodes in the network. For each node 

 can be determined from this formula.
can be determined from this formula. , that is,
, that is,  and so (by the Bernoulli distribution)
and so (by the Bernoulli distribution)

 . The biggest size
. The biggest size  . For the parameters of
. For the parameters of  , and each node is expected to have only about 2 direct neighbours. As a result, the network is likely to remain
, and each node is expected to have only about 2 direct neighbours. As a result, the network is likely to remain  . For the sake of simplicity, let us assume that
. For the sake of simplicity, let us assume that  ) is identified by the pair (
) is identified by the pair ( , each of degree
, each of degree  corresponds to the
corresponds to the  to the
to the  and
and  . The memory required for this is equivalent to the storage for 2(
. The memory required for this is equivalent to the storage for 2( and can arrive at the common secret value
and can arrive at the common secret value  using the column identities of one another. Similarly, if
using the column identities of one another. Similarly, if  . It follows that each node can establish keys directly with 2(σ – 1) other nodes in the network. That’s, however, a truly small fraction of the entire network.
. It follows that each node can establish keys directly with 2(σ – 1) other nodes in the network. That’s, however, a truly small fraction of the entire network. . Suppose further that
. Suppose further that 
 be a finite field with
be a finite field with  , where
, where  , the following matrix is recommended.
, the following matrix is recommended.
 (equivalent to
(equivalent to  ).
). . This corresponds to a deployment error of
. This corresponds to a deployment error of  . The actual location
. The actual location  (or equivalently the error
(or equivalently the error  . The probability density function
. The probability density function  characterizes the pattern of deployment error. One possibility is to assume that
characterizes the pattern of deployment error. One possibility is to assume that  is uniformly distributed within a circle with centre at (
is uniformly distributed within a circle with centre at (
 as a random variable following the two-dimensional normal (Gaussian) distribution with mean (
as a random variable following the two-dimensional normal (Gaussian) distribution with mean (
 and
and 

 defined by
defined by  .
.

 with
with  . The polynomial
. The polynomial 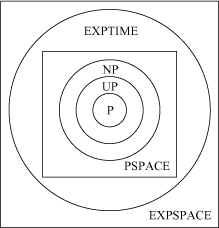
 problem, arguably the deepest unsolved problem in theoretical computer science, may be suspected to have some bearing on public-key cryptography. Under the assumption that P ≠ NP, one may feel tempted to go for using NP-complete problems for building secure cryptosystems. Unfortunately, this tempting invitation does not prove to be fruitful. Several cryptosystems based on NP-complete problems were broken and that is not really a surprise.
problem, arguably the deepest unsolved problem in theoretical computer science, may be suspected to have some bearing on public-key cryptography. Under the assumption that P ≠ NP, one may feel tempted to go for using NP-complete problems for building secure cryptosystems. Unfortunately, this tempting invitation does not prove to be fruitful. Several cryptosystems based on NP-complete problems were broken and that is not really a surprise. and
and  . Both EXPTIME and EXPSPACE have complete problems. An EXPTIME-complete problem cannot be solved in polynomial time, whereas an EXPSPACE-complete problem cannot be solved in polynomial space nor in polynomial time too. How about using these complete problems for designing cryptosystems? The idea may sound interesting, but these provably exponential problems turn out to be even poorer, perhaps irrelevant, for use in cryptography.
. Both EXPTIME and EXPSPACE have complete problems. An EXPTIME-complete problem cannot be solved in polynomial time, whereas an EXPSPACE-complete problem cannot be solved in polynomial space nor in polynomial time too. How about using these complete problems for designing cryptosystems? The idea may sound interesting, but these provably exponential problems turn out to be even poorer, perhaps irrelevant, for use in cryptography. , both the factoring and the discrete log problems need not be outside P, since we are unlikely to produce completeness proofs for them. Only historical evidences exist, in favor of the fact that these two problems are difficult. The situation may change tomorrow. Complexity theory does not offer any formal protection.
, both the factoring and the discrete log problems need not be outside P, since we are unlikely to produce completeness proofs for them. Only historical evidences exist, in favor of the fact that these two problems are difficult. The situation may change tomorrow. Complexity theory does not offer any formal protection.

 .
.
 .
. . (Here, |α| denotes the length of a string
. (Here, |α| denotes the length of a string  .)
.) .
. . So we require
. So we require  .
. , that maps
, that maps  , 0 ≤
, 0 ≤ 
 is suspected to be one-way. Its inverse is the discrete logarithm function.
is suspected to be one-way. Its inverse is the discrete logarithm function. question is relevant for cryptography and not the
question is relevant for cryptography and not the  question. The class UP is not known (nor expected) to have complete problems. So locating a one-way function may be a difficult task. But at the minimum we are now in the right track.
question. The class UP is not known (nor expected) to have complete problems. So locating a one-way function may be a difficult task. But at the minimum we are now in the right track. . Argue that
. Argue that  .
.
 . Then ord
. Then ord  and
and  and so is equal to 1, that is,
and so is equal to 1, that is,  and
and  with
with  . But then
. But then  . Thus #(
. Thus #( and
and  . For each
. For each  , the order ord
, the order ord . Take any element
. Take any element  with ord
with ord satisfies
satisfies  , (
, ( be the intersection of all prime ideals of
be the intersection of all prime ideals of 
 and consider the set
and consider the set  of
of  for all
for all  . If
. If  . Show that
. Show that  is a prime ideal of
is a prime ideal of  , the map
, the map  ,
,  .
.
 be an ascending chain of ideals of
be an ascending chain of ideals of  which is finitely generated by hypothesis.
which is finitely generated by hypothesis.
 be an ideal of
be an ideal of  .
. satisfying 2
satisfying 2 and the fact that a surjective group homomorphism from a cyclic group
and the fact that a surjective group homomorphism from a cyclic group  be a primitive element modulo
be a primitive element modulo  has order
has order  . Show that the order of
. Show that the order of  . The interpolating polynomial is
. The interpolating polynomial is  . Use
. Use  is irreducible in
is irreducible in  if and only if
if and only if  .
.
 of all linearly independent subsets of
of all linearly independent subsets of  has an upper bound in
has an upper bound in  . By Zorn’s Lemma, there exists a maximal element
. By Zorn’s Lemma, there exists a maximal element  . Show that
. Show that  and
and  -submodule of
-submodule of  generated by
generated by  are linearly dependent over
are linearly dependent over  . Now use
. Now use  over
over  is injective, it follows from (a) that
is injective, it follows from (a) that  makes a permutation of α1, . . . , α
makes a permutation of α1, . . . , α is surjective.
is surjective.
 . If the polynomial
. If the polynomial 
 ,
,  , is an endomorphism of
, is an endomorphism of 
 be an irreducible polynomial with
be an irreducible polynomial with  . Let β be another root of
. Let β be another root of  . By
. By  are the roots of
are the roots of  . For
. For  , we have
, we have  , implying that
, implying that  for
for  with
with  for some
for some  . Choose a rational number
. Choose a rational number  . Then
. Then  , a contradiction. Thus
, a contradiction. Thus  . Similarly
. Similarly  .
.
 . Now show that
. Now show that  are distinct
are distinct  -automorphisms of
-automorphisms of  .
.
 , where
, where  is the splitting field of
is the splitting field of  and hence over
and hence over  . Consider the minimal polynomial of a root
. Consider the minimal polynomial of a root  of
of  . Conversely, let
. Conversely, let  . Choose an irreducible factor
. Choose an irreducible factor  of
of  and, therefore,
and, therefore,  , 1728, then the curve
, 1728, then the curve  has
has  . One must also argue that these are actually elliptic curves, that is, have non-zero discriminants.
. One must also argue that these are actually elliptic curves, that is, have non-zero discriminants.
 . We have
. We have  , whereas
, whereas  has a unique square root.
has a unique square root.
 .
.
 . For each
. For each  ,
,  . But then det
. But then det  , where
, where  , δ
, δ . By
. By  is integral over
is integral over  . Let
. Let  be the ideal generated by
be the ideal generated by  in
in  and let
and let  and
and  be the ideals of
be the ideals of  generated respectively by
generated respectively by  and
and  . Now, use Part (b).
. Now, use Part (b).
 and
and  are maximal, we have
are maximal, we have  , that is,
, that is,  and
and  . Now use the fact that (
. Now use the fact that ( is invertible,
is invertible,  for some fractional ideal
for some fractional ideal  .
.
 , let
, let  constitute a complete residue system of
constitute a complete residue system of  modulo
modulo  . Then
. Then  also form a complete residue system of
also form a complete residue system of  modulo
modulo  .
.
 in Part (b).
in Part (b).
 divide this gcd. Then
divide this gcd. Then  divides 2
divides 2 . Take norms.
. Take norms.
 . Then –
. Then – .
.
 for all
for all  .
.
 of every degree
of every degree  .
.
 is obvious. For the reverse implication, use
is obvious. For the reverse implication, use  , take
, take  with ord
with ord with
with  and
and  be the prime factorization of
be the prime factorization of  . Then,
. Then,  . For odd
. For odd  is cyclic of order
is cyclic of order  and hence contains an element of order
and hence contains an element of order  with ord
with ord be a solution of the congruences
be a solution of the congruences  such that
such that  .
.
 , we have ord(
, we have ord( .
.
 for an odd prime
for an odd prime  is bijective ⇔ the restriction
is bijective ⇔ the restriction  is bijective. Now, if gcd(
is bijective. Now, if gcd( is given by
is given by  , where
, where  with ord(
with ord( is not injective. This exercise provides the foundation for the RSA cryptosystems.
is not injective. This exercise provides the foundation for the RSA cryptosystems.
 and α > 1. Then (
and α > 1. Then ( .
.
 , let
, let  and compute a square root
and compute a square root 
 of degrees ≤
of degrees ≤  , deg
, deg  of this algorithm corresponds to
of this algorithm corresponds to  .
.
 is square-free.
is square-free.
 .
.
 and
and  .
.
 .
.
 , where
, where  for
for 
 . Show that trying all possibilities for
. Show that trying all possibilities for  and
and 
 (mod β) are polynomials with small coefficients.
(mod β) are polynomials with small coefficients.
 , a valid signature is (
, a valid signature is ( by the CRT.
by the CRT.
 and sends
and sends  (mod
(mod  for all
for all 
 .
.
 -algebra
-algebra  , where
, where  -linear transformation λ
-linear transformation λ is the minimal polynomial of λ
is the minimal polynomial of λ .
.
 . Construct an LFSR with
. Construct an LFSR with  , any
, any  is a second pre-image for
is a second pre-image for  , computing a second pre-image for
, computing a second pre-image for  we have a collision (
we have a collision ( and for some constant vector
and for some constant vector  , call α ≤ β if and only if |α| < |β| or |α| = |β| and α is lexicographically smaller than β. This ≤ produces a well-ordering of Σ*
, call α ≤ β if and only if |α| < |β| or |α| = |β| and α is lexicographically smaller than β. This ≤ produces a well-ordering of Σ* for some
for some  with γ ≤ β}.
with γ ≤ β}.